
两位著名科学家尼古拉·特斯拉和伽利略·法拉利于 19 世纪分别独立发明了交流感应电动机。随后,交流电动机以其优异的性能成为了当时的主流产品——直流电动机的可靠替代品。为精确分析感应电动机,我们必须考虑到电动机中发生的各类物理现象。在本文中,我们将使用 COMSOL Multiphysics® 软件,在示例模型中引入机电效应。
感应电动机简介
虽然尼古拉·特斯拉和伽利略·法拉利斯于 19 世纪分别独立提出了交流感应电动机早期构想,但大多数人将此项发明归功于特斯拉(交流电系统的忠实支持者)。交流感应电动机以其出色的耐用性、可靠性和适应性成为广受欢迎的产品。


上图:特斯拉感应电动机。图片由 Ctac 提供。在CC BY-SA 3.0许可下使用,通过维基共享资源发布。下图:现代的三相感应电动机。图片处于公共领域,通过维基共享资源发布。
工程师可以通过准确的性能分析对电动机进行优化,然而此类分析需要对所有相关的物理效应进行计算。为了实现这一点,他们可以通过耦合“多体动力学模块”和“AC/DC模块”来分析三相感应电动机的机电效应。COMSOL Multiphysics®5. 3版本的“案例库”中新增了一个示例模型,详细地演示了这项功能。您也可以通过官网“案例下载”获取模型。
三相感应电动机的耦合机电效应仿真分析
下方的图解展示了三相感应电动机三维模型的全部组件。在此例中,我们根据原型对每个零件进行建模;除了轴承和基座,我们将二者模拟为无质量的弹簧。
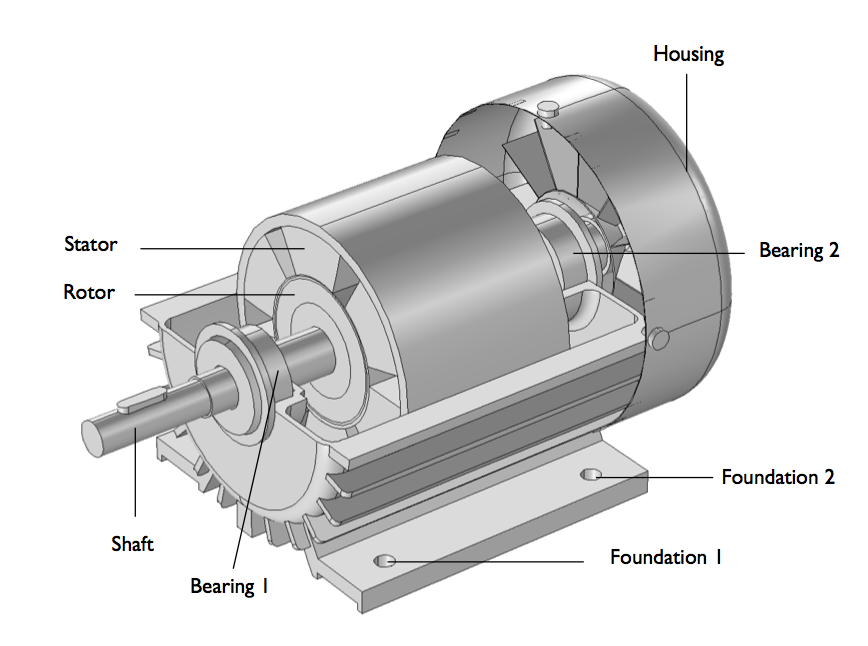
三相感应电动机外壳总成的几何结构。
在此例中,定子和转子稍稍未对齐,导致二者间的微小气隙不对称。这种不对称性在电动机内引起了振动。仿真支持振动现象分析。要在转子中产生感应涡流,依靠的是转子的旋转运动和定子绕组中的时谐电流。
在 COMSOL Multiphysics® 中耦合电磁学和多体动力学
接下来,我们计划执行两个不同的研究:二维电磁仿真和三维多体动力学仿真。在这些研究中,我们使用旋转机械接口来计算电动机的电磁场,并使用多体动力学接口来模拟转子的运动和外壳振动。
我们首先讨论电磁场。在这项分析中,我们特意简化了模型,使其仅包含三个部分:
- 电导率为零的叠层钢定子
- 内部用钢、外部用铝的转子
- 不对称的气隙
下图中的横截面二维几何是一个完整的三维几何的横切面。我们向几何结构中的定子绕组施加 60 Hz 的交流电,绕组使用 2045 匝的均匀多匝线圈特征设置。
如需获取更多有关几何尺寸和电磁模型的信息,请查看模型文档中的参考资料。
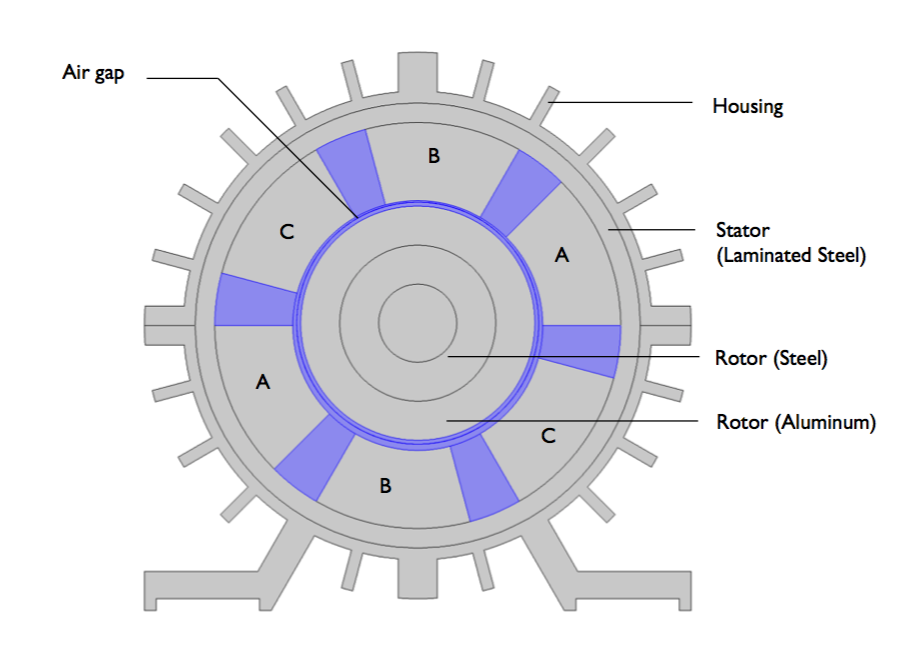
三相感应电动机模型的横截面。定子中三个不同的线圈区域(标记为 A、B 和 C)代表电动机的三相。
下一步是多体动力学分析。这一次我们选择使用全三维几何结构,并将定子、转子和轴模拟为刚性,轴上的转子采用了刚性安装。转子和钢结构外壳之间的弹性铰链关节代表轴承,其作用是支撑转子,并将力传递到外壳。至于外壳,我们假设它为弹性外壳,并且使用弹性固定关节将其连接到基座。此外,我们基于旋转扭矩计算转子的角速度,而旋转扭矩可以计算为时间的函数。
根据上述两项计算结果,我们执行了机电分析,此分析将电磁仿真和多体动力学仿真耦合在一起。举例来说,将旋转机械接口的计算值(比如因定子和转子未对准而产生的电磁力以及电磁扭矩)添加到多体动力学接口的转子和定子上。
为了确定转子速度,我们可以再一次耦合这两个接口,也就是将多体动力学接口中铰链关节的角动计算值传送到旋转机械接口。
三相异步电动机的机电分析结果
现在我们仔细研究一下磁通密度模随时间的变化情况和转子的电磁力。在计算电磁力时,我们发现定子和转子的错位还导致横向方向上产生了振动力。

转子的磁通密度模随时间的变化(左)以及定子在横向和轴向方向上的电磁力(右)。
至于电磁扭矩,当转子速度等于定子的电频率时,如果未对轴施加负载,电磁扭矩会降为零。转子速度等于定子电频率的时间延迟则取决于转子的惯性。在此例中,转子经过 0.7 秒达到了稳态转速。


转子的电磁扭矩(左)和角速度(右)随时间的变化情况。
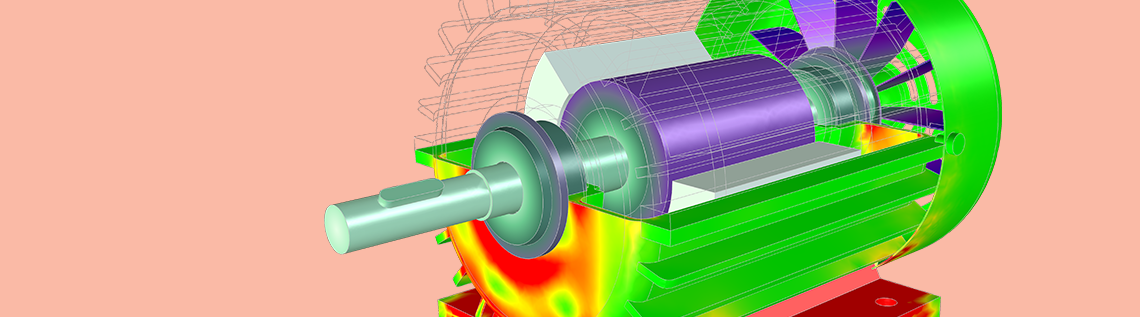
为了找出电动机中的高应力区域,我们将转子速度分析与外壳的 von Mises 应力分布结合在一起。如下方动画所示,靠近轴承的区域以及外壳和基座连接处的应力值最大。
外壳中的 von Mises 应力分布和转子速度分布。
下方绘图展示了“轴承 1”、“轴承 2”和“基座 1”上的作用力与时间的函数关系。这些力经由弹性外壳传递到电动机的基座上。



“轴承 1”(左)和“轴承 2”(中)在横向和轴向方向上承受的力。外壳和基座连接处,即“基座 1”位置上的力(右)。
通过分析电磁力的频谱,我们得出结论:频率等于 120 Hz,是定子电频率的两倍。尽管如此,外壳-基座连接处的频谱图显示,主频率约为 60 Hz,83 Hz 左右出现了几个峰值——这是感应电动机外壳组件的一阶固有频率。


转子的电磁力频谱(左)和外壳-基座连接处的力(右)。
最后,我们观察一下转子的运行轨迹,运动产生的原因是转子相对于定子的横向振动。造成横向振动的原因是作用在转子上的横向电磁力以及支撑转子端部的轴承的有限刚度。在下图中,由于转子在轴向上具有非对称惯性,所以轨道的中心不同。
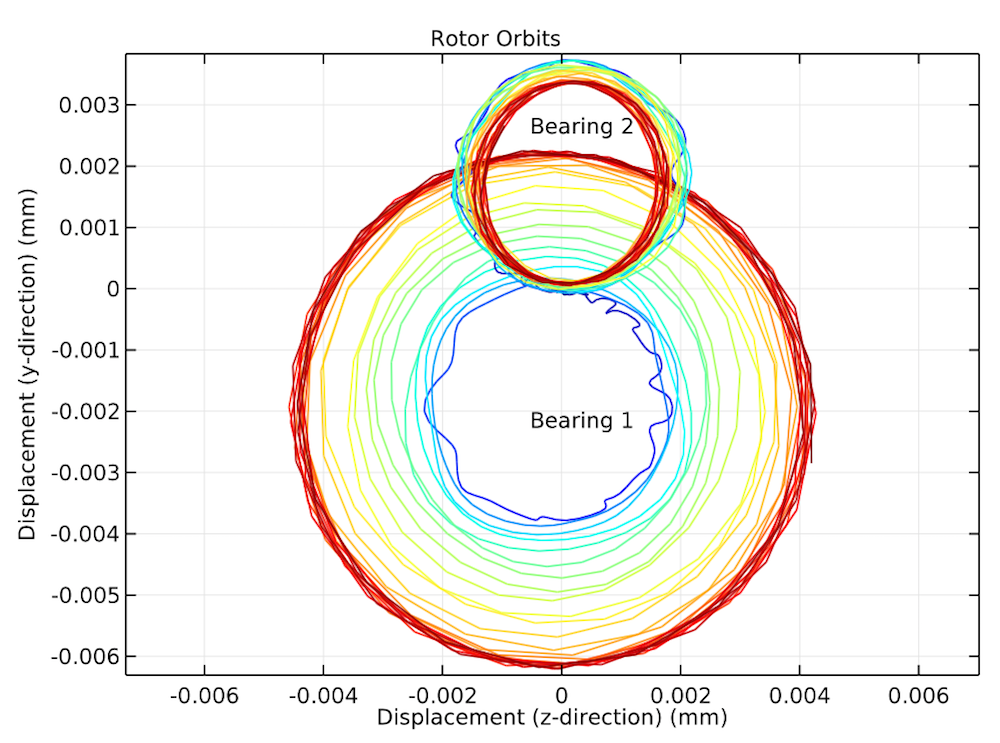
转子在两个轴承位置上的运行轨迹,旋转和振动同时发生。
想要亲自尝试进行此类机电分析吗?您可以通过下方按钮访问此教学模型。
阅读更多关于感应电动机和电磁仿真的文章
- 阅读关于机电耦合分析的博客文章:
- 浏览“COMSOL博客”,了解异步电动机建模:

评论 (0)