

当汽车在行驶中撞上坑洼时,悬挂系统会在几秒钟内受到严重损坏。悬挂系统必须能够适应无数的路况,同时支撑汽车的车轮、座椅和车身。要研究车辆悬挂系统的性能,我们可以使用多体分析和机械系统的简化集总模型。
为创新型车辆悬挂系统奠定基础
如果撞上坑洼有好的一面呢?车辆悬挂技术的创新可以使这成为可能。一些潜在的发展包括:将动能转化为电能为车辆提供动力的方法,可以减少坑洼的软件驱动式冲击,以及通过语音指令调整机械悬挂的设置。
如果没有一个坚实的基础,是不可能增强悬挂系统的。毕竟,任何车辆的悬挂系统都需要适应载荷变化,吸收道路上的倾斜和颠簸等等。否则,会出现常见的悬挂问题,如车轮定位不良、弹簧磨损和减震器损坏。

带有悬挂系统的底盘示例。图片来自 Christopher Ziemnowicz — 自己的作品。根据CC BY-SA 2.5许可,通过Wikimedia Commons。
通过在COMSOL Multiphysics 软件中建立简化的集总模型,我们可以分析和优化车辆悬挂系统设计。
在 COMSOL Multiphysics®中模拟集总机械系统
自 COMSOL Multiphysics 5.3a 版开始,软件内置的集总机械系统接口可以用来以非图形格式对离散机械系统进行建模。这个系统可以用质量、阻尼器和弹簧来表示。我们可以选择将这些系统连接到 2D 或 3D多体动力学接口。对集总机械系统建模时,可以同时使用多体动力学模块中的集总机械系统和多体动力学接口。
在本教程中,车辆悬挂系统的集总模型有三个主要组件:
- 车轮
- 座位
- 身体
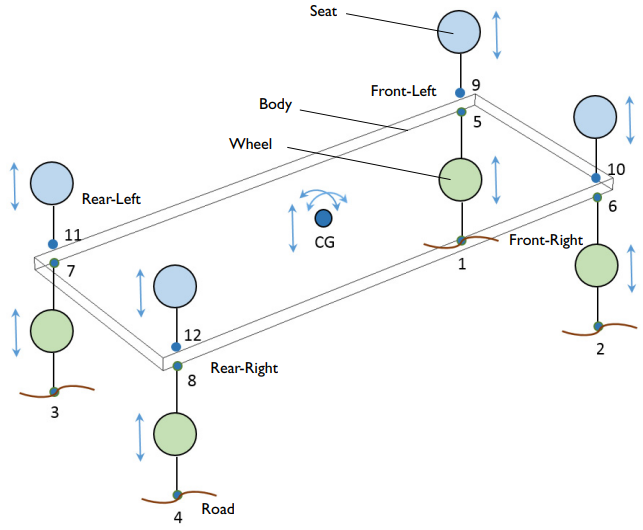
具有三个主要组件的车辆悬挂系统的集总模型。
每个轮子都有一个自由度(DOF),在上图中用绿色圆圈表示。每个座位用蓝色圆圈表示,也有一个自由度。在重心处,车体有三个自由度来解释系统的旋转:
- 侧倾
- 纵倾
- 俯仰
我们可以使用多体动力学接口中的刚性域节点和指定位移/旋转子节点来限制实体的自由度数量。
要对车轮和座椅进行建模,可以使用集总机械系统接口的质量,弹簧和阻尼器节点。整车模型包括四个车轮和四个座椅,两个部件都被定义为一个子系统。
下面的示意图中显示了质量(m)、弹簧(k)和阻尼器(c)。车轮的集总模型考虑了其质量和刚度,以及车辆悬挂的刚度和阻尼。座椅的集中模型考虑了其刚度和阻尼,以及乘客的质量。
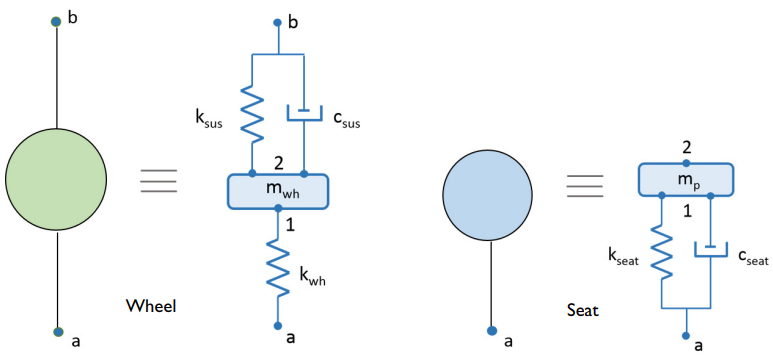
车轮和座椅的集中模型。
使用集总机械系统接口的外部源节点模拟车身,这有助于在轮体和车身座点处将悬架系统与车身连接起来。
查看瞬态分析结果
通过瞬态分析,我们可以计算给定路形时车辆运动和座椅振动水平。在这种情况下,道路的凸起高度为 4cm,宽度为 7.5cm。假设车辆以 40km/h 的恒定速度行驶。通过假设道路上的一系列凸起对路面不平度进行建模,但仅假设车辆的左轮在凸起上行驶。
下面,我们来看看车辆滚动、节距和隆起随时间变化的曲线。这些结果可能有助于设计振动,直观地减少撞击坑洼后的侧倾、纵倾和升降。
如下图所示,当车辆的左侧在给定路形的凸起上移动时,对于给定的道路激励,滚动旋转大于节距旋转。我们还可以在下面右侧的速度图中看到侧倾、纵倾和升降运动的相应速度。两个不同的频率——低频和高频——对应于系统部件的固有频率。


重心处的车辆侧倾、纵倾和升降运动(左)以及相应的车辆速度(右)。
例如,如果我们想利用撞击坑洼产生的动能,需要确定车辆如何移动以及移动的速度。在这种情况下,我们可以分析所有四个座椅位置的位移和加速度随时间的变化。座椅位移结果显示,车辆左侧的位移要大得多,因为这一侧会越过道路上的凸起,而右侧不会。


座椅位移(左)和座椅加速度(右)的时间曲线。
最后,为了确定悬挂的软硬程度,并对其进行相应的修改,我们想知道弹簧中力的情况。结果表明,车轮的弹簧和阻尼器所受的力远大于座椅。这是因为力被车轮和车身的惯性吸收,所以只有一小部分力从车轮传递到座椅。此外,与车轮上的力相比,座椅上的力振动频率要低得多,从而使乘坐时更加平稳。


左前轮(左)和左前排座椅(右)的弹簧和减震器中的力。
后续步骤
这个简化的模型为分析车辆悬挂系统提供了坚实的基础,我们可以将其与实验数据进行比较来验证仿真结果。通过验证,我们可以增强悬挂系统的设计,获得真实性能。
点击上面的按钮,尝试自己动手模拟车辆悬挂系统集总模型教程。

评论 (0)