汽车中的主动空气动力学
长期以来,汽车工程师一直致力于通过微调空气动力学来提高汽车的效率、速度和稳定性。汽车最重要的两个空气动力学指标是阻力和下压力。阻力是一种阻碍汽车向前行驶的力,能够降低速度和燃油效率;下压力则是一种垂直向下的力,它通过将汽车推向地面来增加牵引力,从而提高汽车的稳定性和操控性。下压力通常是有益的,但产生下压力往往会增加阻力,从而在速度和稳定性之间产生权衡,设计师必须进行平衡才能实现汽车的速度、操控性和燃油效率的综合提升。
主动空气动力学通过一种动态移动组件的方法,实时优化阻力和下压力,从而提供更加精细和响应灵敏的驾驶体验,改变了汽车设计。与使用固定组件的传统被动空气动力学设计相比,主动空气动力学的特点是配置了可以改变位置和形状的机翼、襟翼和通风口等组件。在合法上路的汽车中,这些调整由利用实时数据并根据驾驶条件来改变这些组件的车载电脑控制。

Bugatti Veyron® 的尾翼在高速行驶时会升起,以产生更大的下压力。图片属于公有领域,通过 Wikimedia Commons共享。
1986 年发布的 Porsche®959 是第一款配备主动空气动力学系统的合法公路用车。这项技术很快便引起了人们的关注,并在布加迪威龙(Bugatti Veyron®)、三菱(Mitsubishi® 3000GT)和帕加尼 (Pagani Huayra®) 等高性能汽车的设计和性能中发挥了重要作用。如今,许多合法上路的汽车都采用了主动空气动力学设计,部分原因是为了提高燃油效率。汽车可以配备多种主动空气动力学特征,包括:
- 可以根据车速和驾驶模式升高和改变角度的可调式尾翼,用于平衡燃油效率、提高车辆性能和充当空气制动器(参考文献 1)
- 用于提高操控性的可调节式前分流器(参考文献 1)
- 可以根据发动机的冷却需求打开或关闭的前格栅中的主动式挡风板,从而在不需要冷却的情况下减少阻力(参考文献 2)
另一个采用主动空气动力学创新技术的示例是当今最惊险刺激的高性能运动之一—一级方程式赛车中的 DRS。

2015 马来西亚大奖赛(2015 Malaysian Grand Prix)。图片来源于 Wikimedia Commons,获 知识共享署名–相同方式共享 4.0 国际版许可。
赛车运动中的 DRS
DRS 被视为一种主动空气动力系统,因为它涉及对一级方程式赛车的空气动力组件进行实时调整。与前面提到的公路赛车不同,一级方程式赛车的 DRS 可让驾驶员直接控制该系统。
在赛车运动中,DRS 旨在减少追赶赛车的空气阻力,以在比赛中获得超车机会。通过减少空气阻力,DRS 能够使赛车在赛道的指定直线段(也称为“直道”)获得显著的速度优势,从而更容易超越前车。这就为许多观众带来更加激动人心和充满活力的比赛。因此,DRS 已成为大奖赛(Grand Prix™ )比赛中关键的战略和战术要素。

红牛赞助的一级方程式赛车上的可调式尾翼。图片来自 Wikimedia Commons, 获 知识共享署名–相同方式共享 4.0 国际版许可。
DRS 的核心组件是可调式车翼,我们在此将其称为 “DRS 襟翼”。DRS 襟翼可在两个位置之间转动,一个用于产生高下压力,另一个用于产生低阻力。当 DRS 启动时,DRS 襟翼上升以减小攻角,即弦线与迎面气流或车辆行驶轨迹之间的夹角。这种变化会降低翼面产生的下压力,进而减小空气阻力。阻力减小后,汽车受到的空气阻力也会减小,从而能在直道上达到更快的速度。赛车工程师估计,DRS 工作期间的车速可提升至 10–12 km/h(6.2–7.5 mph)。
DRS 被设计为仅在最适合超车的指定直道上使用。这是因为下压力减小也意味着赛车的抓地力降低,从而使稳定性降低,最终导致汽车在过弯道时非常不安全。当驾驶员驶出 DRS 区域并关闭系统时,DRS 襟翼会下降,阻力和下压力会恢复到正常水平,从而提高赛车的抓地力。
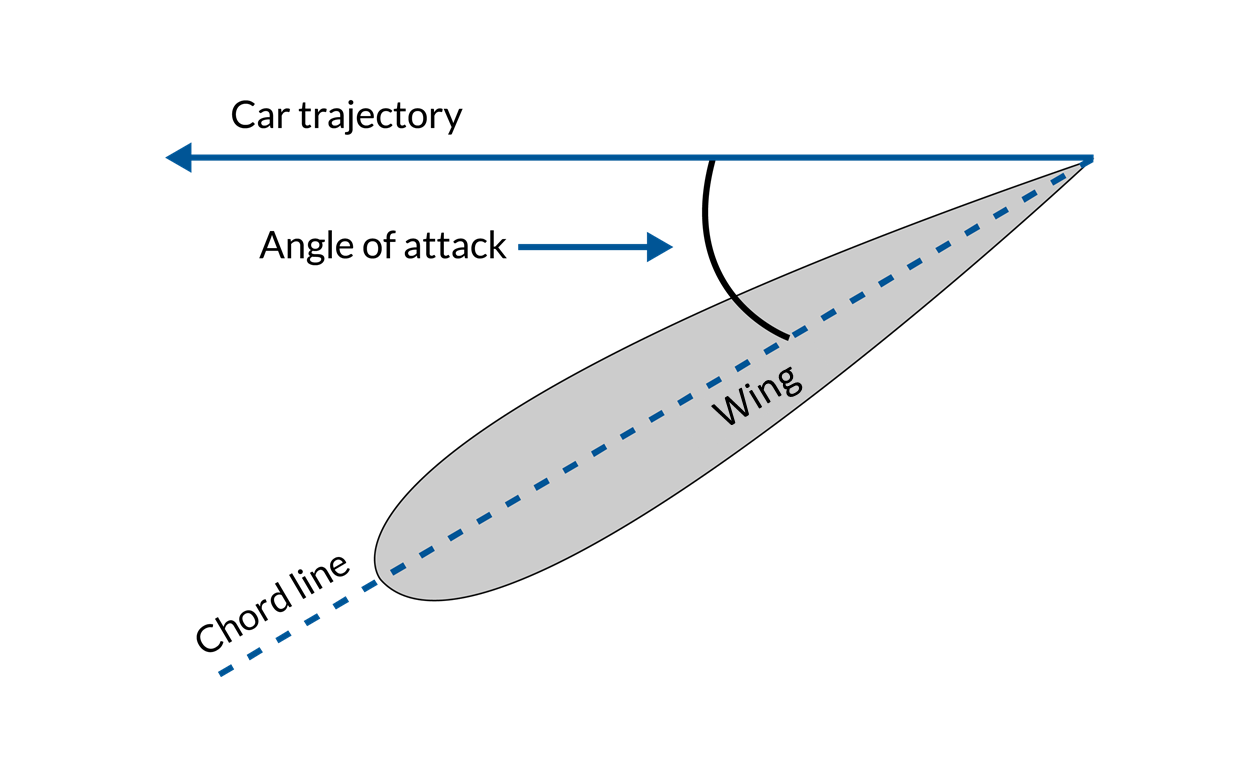
机翼的攻角,在决定机翼产生的阻力方面起关键作用。
模拟 DRS 效应
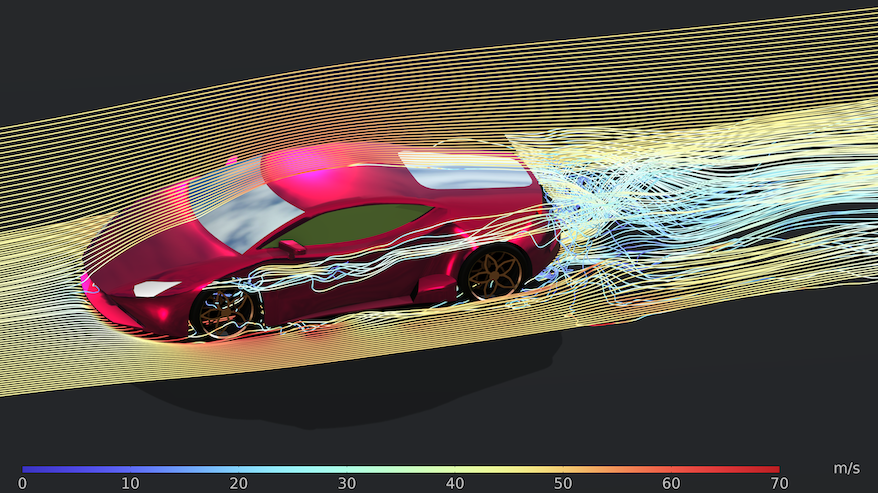
在汽车设计中,计算流体动力学(CFD)可用于模拟和分析汽车周围的气流,并预测汽车设计的改变如何影响其空气动力性能。CFD 仿真具有独特的优势,因为它可用于直观地显示气流模式、评估车辆各组件所受到的气动力,以及优化设计参数,同时避免了反复试验所带来的成本和时间问题。CFD 仿真不仅是设计主动空气动力组件的关键步骤,也在汽车制造的其他几个方面发挥着重要作用。
现在,让我们在 COMSOL Multiphysics® 中建立一个简单的 DRS 襟翼模型,来模拟类似于一级方程式赛车配备的可调式尾翼。模拟目标是对 DRS 运行期间尾翼上的空气阻力和下压力变化进行量化检测,以更好地了解激动人心的超车背后的物理原理。
一级方程式赛车的典型尾翼组件由两个横跨车身宽度的翼板组成。尾翼两侧安装了垂直端板,用于管理气流和减少翼尖涡流造成的阻力。在我们的模型中,为了简化分析,考虑了尾翼组件的二维横截面。这样,我们就可以忽略端板,只考虑两个翼板的横截面几何形状。我们将上翼称为 “DRS 襟翼”,下翼称为“主襟翼”。(注意,只有上翼是可调节的。)两个翼板均使用 NACA 6409 翼面。虽然 NACA 6409 翼面并不能真正代表一级方程式赛车的尾翼,但我们的模型旨在简单演示可调式襟翼对空气阻力和下压力的影响。在 DRS 襟翼的尾端固定了一个格尼襟翼(gurney flap),以在不显著增加阻力的情况下增加下压力。假设翼板是完全刚性的。
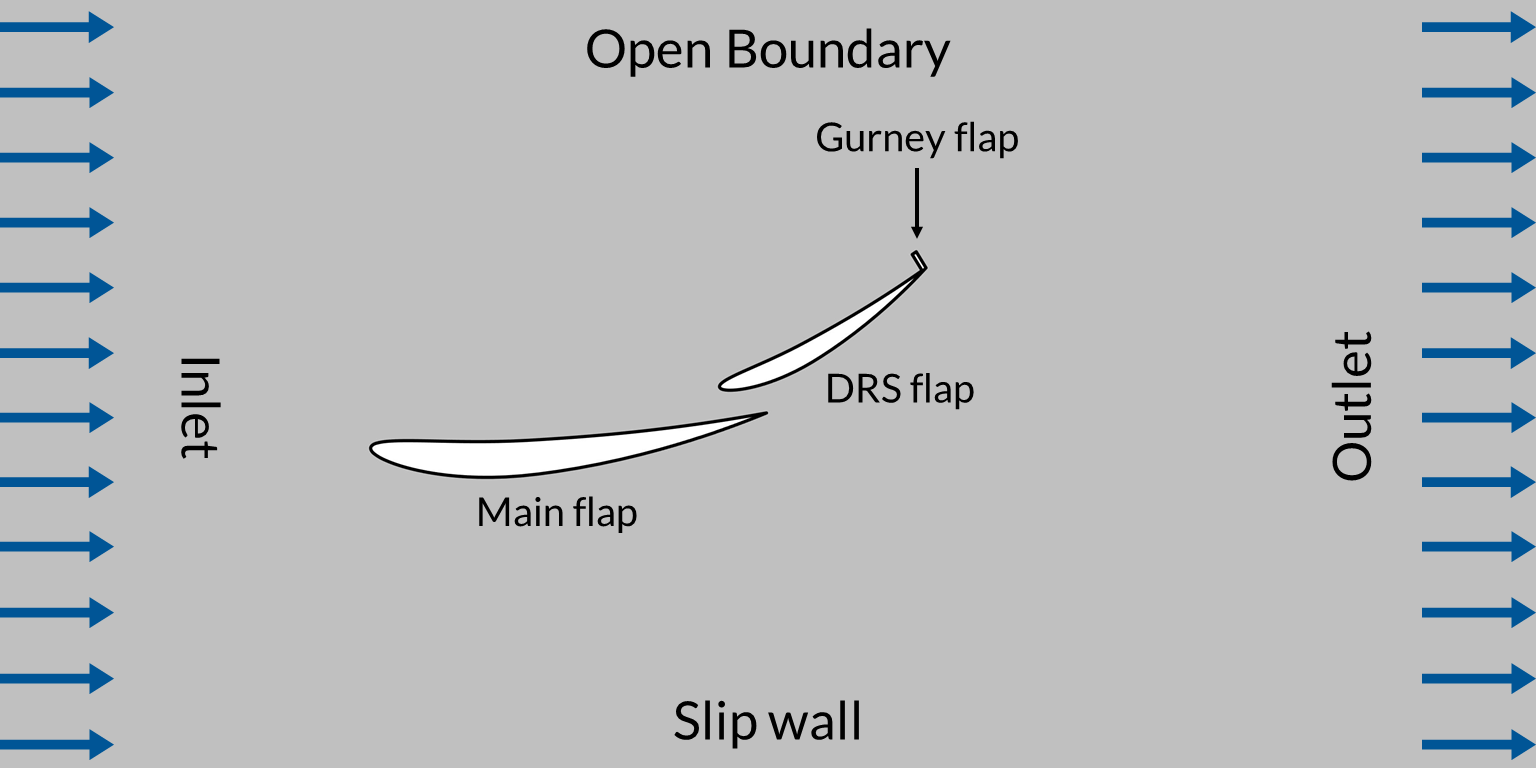
由两个 NACA 6409 翼板组成的模型的数值设置。入口和出口分别被定义为左边界和右边界。分别使用开放边界条件和滑移壁条件定义上、下边界。
使用 COMSOL® 中的 动网格 接口模拟 DRS 襟翼的驱动,使其与主襟翼间距不超过 85 mm。这符合一级方程式的规定,即 DRS 襟翼与主襟翼的最大距离为 85 mm。使用 湍流、k-ε 接口计算域中的气流。由于我们将参考坐标系固定在尾翼上,因此将进气速度定义为 90 m/s 来模拟赛车在赛道上以 323.7 km/h(201 mph)的速度行驶的情况。在 DRS 处于非激活状态(即 DRS 襟翼放下)时,执行稳态研究以获得稳态气流分布。然后,执行瞬态研究来模拟可调式襟翼的瞬态效应。
度量指标
阻力系数是一个无量纲数,用于测量物体在流体中运动时所受到的阻力或流阻。它表示流体(在本文示例中为空气)在物体周围流动的顺畅程度,阻力系数越小,通常表示阻力越小,空气动力学效率越高。阻力系数  可以表示为
可以表示为
式中, 是流体密度,
是流体密度, 是速度大小,
是速度大小, 是翼上力的 x 分量,
是翼上力的 x 分量, 是翼的横截面, 可表述为
是翼的横截面, 可表述为
和
式中, 是壁面剪切应力,
是壁面剪切应力,  是切向速度。对机翼边界进行表面积分。
是切向速度。对机翼边界进行表面积分。
在攻角为零时,下压力可以由剪切应力的垂直分量  计算。如果攻角不为零,可以使用表达式
计算。如果攻角不为零,可以使用表达式  将力映射到升力方向上,其中
将力映射到升力方向上,其中  表示以弧度为单位的攻角,
表示以弧度为单位的攻角, 是剪切应力的水平分量。
是剪切应力的水平分量。
模拟结果
下图中的动画演示了 DRS 运行期间的不同指标。本文,DRS 在研究开始后 2s 启动,然后大约持续 3s。在我们的模型中,运行时间有些随意,但这与比赛中真正的 DRS 操作非常相似。
动画 A 显示了网格如何随着 DRS 襟翼的移动而变形。图中显示了 DRS 襟翼从主襟翼上抬起的幅度。DRS 襟翼旋转 19.5˚ 相当于从主襟翼上抬起 84 mm,符合规定。
动画 A:仿真结果显示了使用 动网格 接口模拟的网格单元的变形(左)以及 DRS 襟翼相对于主襟翼的位置(右)。
动画 B 显示了 DRS 运行期间的速度流线。从图中可以看出,当 DRS 启用时,空气的最大速度较低。但不应将这与汽车的速度相混淆,因为当襟翼升起时,汽车的速度会更高。
动画 B:仿真结果显示了速度分布和流线(左)以及域中的最大速度(右)。
动画 C 显示,当启动 DRS 后,尾翼的阻力系数最多可降低 27.1%。同时绘制了襟翼上的下压力,结果显示启动 DRS 后,襟翼上的下压力最多减少 23.6%。
动画 C:仿真结果显示了 DRS 运行期间的风阻系数和下压力。
虽然这些结果是通过任意几何形状建立的模型得出的,但在现实生活中应用 DRS 可对阻力产生重大影响。例如,在大学生方程式赛车中,DRS 可减少高达 78% 的阻力(参考文献 4)。阻力的减少会根据赛车的速度、空气动力设置、具体的 DRS 设计和赛道布局而有所不同。
仿真的优势
主动式空气动力学技术为高速赛车带来了显著优势,在合法上路的汽车中也越来越受欢迎。文中介绍的模型使用赛车尾翼组件的简单二维横截面表示,展示了可调式襟翼对阻力和下压力的影响。这种简单的模型可以帮助理解 CFD 原理,并展示了空气动力学的精彩应用。文中介绍的模型设置还可以扩展到使用 COMSOL® 中的 流-固耦合 多物理场接口来模拟襟翼在压力应力作用下的结构变形。
使用 COMSOL 模型研究汽车的空气动力学。
动手尝试
如果您想自己尝试研究可调式襟翼对阻力和下压力的影响,请单击下方按钮,进入 COMSOL 案例库,下载文中的相关模型。
参考文献
- J. Piechna, “A Review of Active Aerodynamic Systems for Road Vehicles,” Energies, 2021.
- C. Pfeifer, “Evolution of active grille shutters,” SAE Technical Paper, 2014.
- W. Yu and G. Wei, “A Review of the influence of active aerodynamic tail on vehicle handling stability,” Journal of Physics: Conference Series, 2021.
- R. Loução, D. Gonçalo, and M. Mendes, “Aerodynamic study of a drag reduction system and its actuation system for a formula student competition car,” Fluids, 2022.
- J. Noble, “How F1’s new active aero will work in 2026,” Autosport, 2024.
延伸阅读
阅读下列 COMSOL 博客,了解更多文中讨论的相关主题信息:
本文提供的信息与 2024 赛季相关。一级方程式赛车中的 DRS 系统将于 2026 年被更复杂的主动空气动力学系统取代,该系统可进行更多的动态调整(参考文献 5)。一级方程式赛车是一项不断变化和创新的运动,本文所讨论的技术在未来可能会过时。本文旨在展示仿真在理解空气动力学原理方面的功能,而非赛车运动的规则指南。一级方程式是 Formula One Licensing B.V. 的注册商标,大奖赛是其未注册商标。Huayra 是 PAGANI S.p.A. 的注册商标。 Mitsubishi 是 MITSUBISHI JUKOGYO KABUSHIKI KAISHA 的注册商标。Porsche 是 Dr. Ing. h.c. F. Porsche Aktiengesellschaft 的注册商标。
]]>
历史上对圆周率的近似计算
已知最早的圆周率近似值出现在古代文明中。巴比伦的数学家将圆周率近似为 3,这个数值在当时的建筑工程中是合理的,后来又被精确为 3.1251。埃及的数学家和印度的学者分别通过比较圆形和八边形的面积2 ,和通过巨量的计算3得出了近似的数值。包括阿基米德在内的一些希腊学者利用几何方法将圆周率的近似值精确到 3 个数量级以内4,使圆周率的计算取得了重大突破。

左图:Domenico Fetti 于 1620 年创作的 Archimedes Thoughtful(又名:Portrait of a Scholar)。图片属于公有领域,通过 Wikimedia Commons 共享。右图:Leonardo Fibonacci 的肖像。图片属于公有领域,通过 Wikimedia Commons 共享。
{kind=link}
{kind=link}
如今我们普遍使用的 3.14 近似值来自中国数学家刘徽,他提出这个近似值的目的是为了实用5。圆周率计算的后续发展涉及无穷级数估算和三角关系的利用。数学家们利用微积分推导出了无穷级数,可用于计算高精度的圆周率,其中 Fibonacci 和 Al-Khwarizmi 做出了重要贡献。
这些发展为我们使用的现代方法奠定了基础,包括计算机中使用的算法,即通过先进的数学工具和计算能力计算万亿位数的算法,以极高的精度计算圆周率。一些著名的计算方法包括 Chudnovsky 算法、Gauss–Legendre 算法、Machin 公式,以及 Monte Carlo(蒙特卡罗)方法。
通俗易懂的蒙特卡罗方法
蒙特卡罗方法是一种依靠随机抽样来估计数值结果的计算技术,特别适用于包含大量变量的问题。对于这种情况,可以利用内在的随机性来解决确定性问题。想象这样一个场景,你正在为一场聚会计算需要订购多少个披萨。这里的确定性问题是计算每个人要吃多少片披萨。与其询问每个人要吃多少片披萨,然后求和得出结果(这对一个大型聚会来说可能相当麻烦),不如随机挑选几个朋友,询问他们要吃多少片披萨,然后求平均值来解决问题。这有点像蒙特卡罗方法,即使用随机样本来估计一个值。蒙特卡洛法被广泛用于模拟复杂现象,如流体、统计力学、生物化学、密码学、社会学和心理学。
这种思维可以扩展到现在流行的一种有趣的估计圆周率的方法。这种方法是在一个正方形内随机放置一些点,然后计算有多少点位于正方形内切圆内。圆内的点数与总点数之比可以用来近似计算圆周率。由于内嵌在边长为 2r 的正方形中的圆的面积为 πr² ,而正方形的面积为 (2r)² = 4r² ,因此它们的面积之比为 π/4。也就是说一个点落在圆内的概率是 π/4。因此,如果我们将圆内点数与总点数之比乘以 4,就可以得到 π 的估计值。这是因为随着点数的增加,比率会趋近于实际值 π/4。

估计圆周率的基础。
在 COMSOL Multiphysics® 中使用蒙特卡罗方法估算圆周率
为了进行这个简单的蒙特卡罗模拟,我们将使用 数学粒子追踪 接口。在 COMSOL Multiphysics® 软件平台中添加粒子追踪模块就可以使用这个接口。虽然该模块的用户通常不会使用它来随机生成点,但出于可视化和美观的目的,我们决定在这个有趣的示例中使用它。
现在,我们来举例说明。一些粒子被随机释放到一个正方形区域并保持静止。对位于正方形内切圆区域内的粒子数量进行追踪,来获取圆周率的实时估计值。可以看到,随着点数的增加,估计值(蓝色实线)逐渐接近真实值(绿色虚线)。值得注意的是,估计值的精确度并不随点的数量呈线性变化。蒙特卡罗近似的统计误差通常与 1/sqrt(n) 成正比。这意味着,要将误差减少 10 倍,通常需要将点数增加 100 倍。
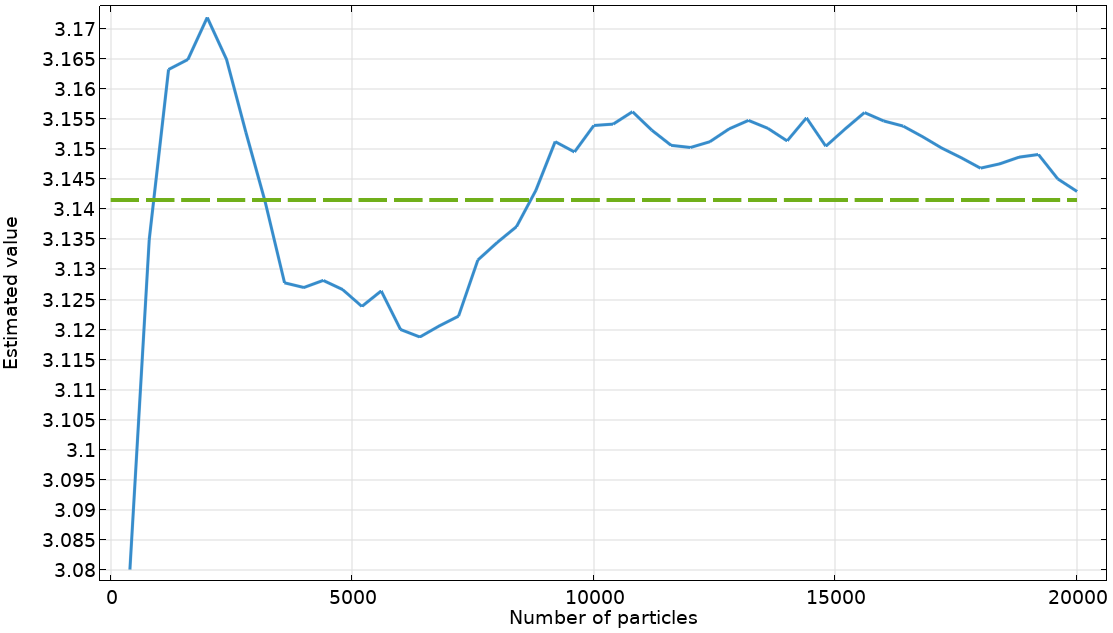
在随机放置的点数不断增加的情况下,圆周率的实时估计值(蓝色实线)与真实值(绿色虚线)的比较。
接下来,我们使用 COMSOL Multiphysics® 中的 App 开发器创建了一个基于多物理场仿真模型的仿真 App。在这个 App 中,我们可以使用一个滑块改变点的数量,并获得圆周率在不同点数的估计值以及与真实值的误差。该 App 还将随机放置的点可视化,并通过颜色协调来识别位于圆内的点。
使用仿真App根据不同的点数估算圆周率,并获得对结果的可视化解读。
下一步
欢迎从 COMSOL 案例库下载包含 App 设计和相关文件的 MPH 文件:使用蒙特卡洛法估算圆周率值。
- 更多使用蒙特卡罗方法的模型:
- 演示如何直接对 Ishigami 函数进行蒙特卡罗模拟的示例
- 使用蒙特卡洛法评估自由分子流动体系中简单涡轮分子泵性能的模型
- 使用蒙特卡洛法计算通过 S 形弯曲几何结构的传输概率的模型
- 有关 App 开发器的信息:
- 阅读博客:App 开发器让更多人受益于多物理场仿真,了解 COMSOL 用户对 App 开发器的使用评价。
- 阅读用户案例:借助仿真 App 预测水果保质期,了解一款基于多物理场仿真模型开发的智能手机应用程序
- 阅读用户案例:使用仿真 App 进行远程实验课程教学,了解一位大学教授如何使用仿真 App 进行教学
参考文献
- P. Beckmann, A History of π. New York: St. Martin’s Press, 1971
- C. Rossi, Architecture and Mathematics in Ancient Egypt. Cambridge University Press, 2004
- C. Krishna, A profile of Indian culture. Indian Book Company, 1975
- D.B. Damini & A. Dhar, How Archimedes showed that pi is approximately equal to 22/7. arXiv e-prints, 2020
- Y. Lam & T.S. Ang, Circle measurements in ancient China, Historia Mathematica, 1986