
电动机械是现代工业社会的重要支柱。在这类种类繁多的机械设备中,发电机或电动机一类的旋转机械应用最为广泛。COMSOL Multiphysics 中的旋转机械,磁物理场接口即旨在模拟这些系统。请跟随我们一起探讨旋转机械的模拟过程,并了解使用此功能详细的最佳做法。
旋转机械的几何
任何一种旋转磁力机械都包含两个零件:定子和转子,中间有空气缝隙将其分隔开,并驱使转子旋转。因为有限元方法不支持旋转,所以旋转机械,磁接口利用移动网格的方法模拟这种旋转。
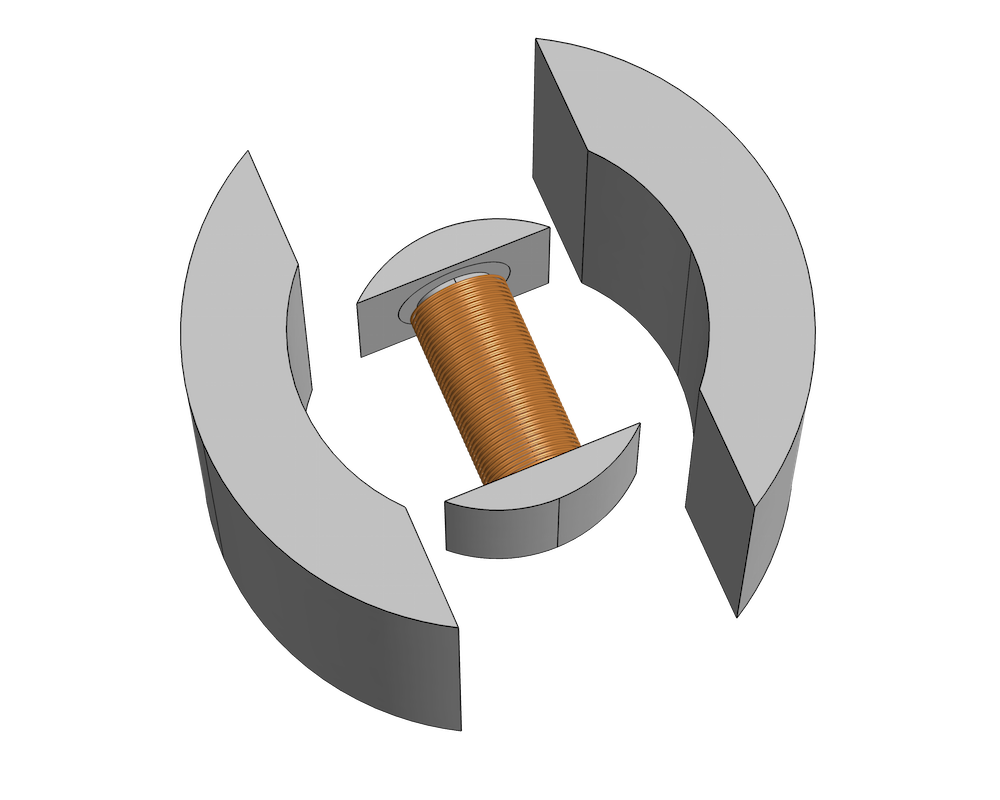
直流换向电机的几何,其中包含两个永磁体和一个旋转绕组。
这种机械的几何切割(通常沿着空气缝隙)成两部分:一部分包含定子,另一部分包含转子。之后这两部分分别进行网格剖分。在模拟过程中,含有定子的部分保持静止,含有转子的部分则旋转。这两部分以及相应的网格一直在切割边界相接触。

几何必须包含两磁体间的空气缝隙。红色表示一条可能的切割边界。
默认情况下,几何序列的最后一步是形成联合体、合并所有几何对象并作为一个对象进行网格剖分,最终完成定型。在分别对这两部分进行网格剖分之前,必须通过形成装配使对象定型。首先利用并集与其他操作,为静止部分和旋转部分分别创建一个几何对象。随后对几何序列的定型节点选择形成装配。定型过程中,一致对会自动创建在定义下,表示这两个对象的共同(接触)边界。
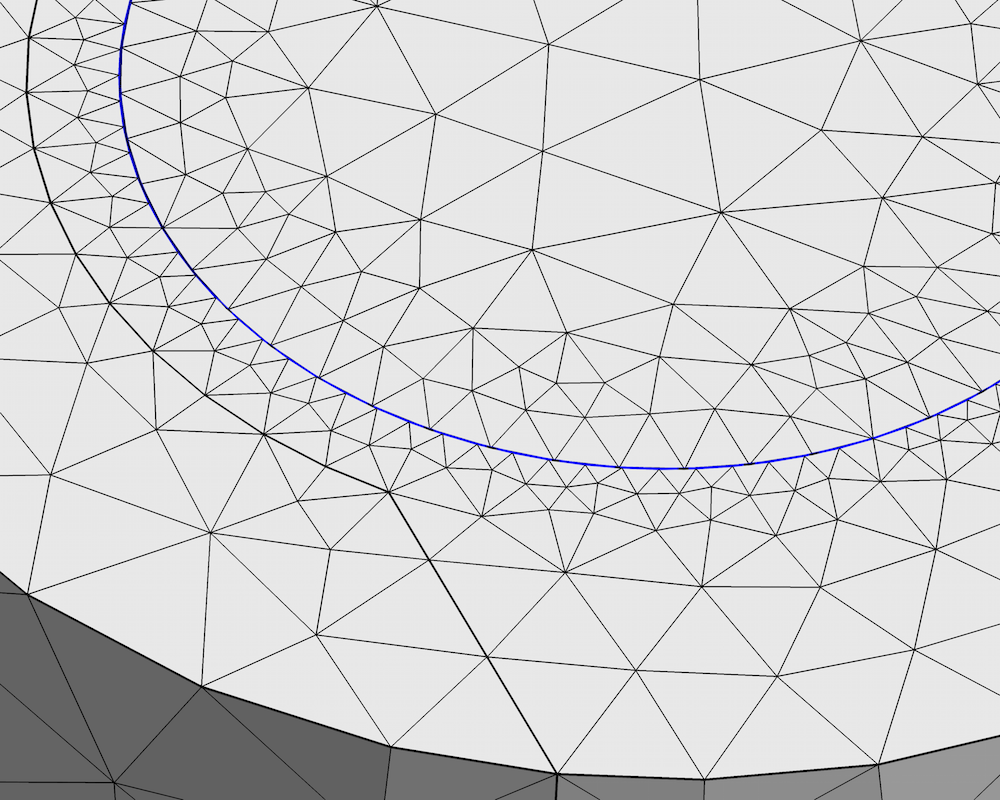
直流电机的网格放大图。旋转部分和静止部分已分别进行了网格剖分,在图中显示为两侧不同的网格节点位置。边界高亮显示为蓝色,包含在一致对中。在旋转过程中,这两部分的网格彼此滑动,在一致对上保持接触。
观看视频,学习在旋转机械模型中使用形成装配。
现在就可以使用旋转机械,磁接口定义系统的动力学了。使用指定旋转特征指定旋转角(可指定为与时间相关),或使用指定旋转速度特征输入一个恒定的角速度。应用以上任一个特征后,COMSOL Multiphysics 软件将对选定域启用移动网格功能,同时设置合适的电磁场变换。
“指定旋转”特征或“指定旋转速度”特征必须应用到包含转子的旋转部分。
切割处会怎样变化呢?从物理角度而言,空气缝隙处的电磁场是连续的,并假定材料均匀。与其他内部边界不同的是,一致对处的磁场不会自动连续。要强制其连续,须对一致对使用连续性对特征。
混合公式
旋转机械,磁接口通过求解 Maxwell 方程计算电磁场的分布。在各个物理场确定后,就能计算出大部分相关的物理量(如施加的扭矩)。在瞬态分析中,这个接口应用了准静态近似,这一方法会忽略位移电流密度,或者近似认为机械的电容效应可忽略。完成近似处理后,机械中的全部电流要么是外加的(也就是通过励磁绕组),要么是机械的导电部件感应产生的涡流。不导电部分(如空气间隙)不会产生任何电流密度。
该接口使用两种方法求解 Maxwell 方程:矢量势公式和标量势公式。第一种方法引入矢量场\mathbf{A}(磁矢势),磁通密度和电场定义为
\mathbf{E} &=-\frac{\partial \mathbf{A}}{\partial t} \\
\mathbf{B} &= \nabla \times \mathbf{A}
\end{align}
有了\mathbf{B}场和\mathbf{E}场,就会自动计算两个 Maxwell 方程:法拉第定律和磁通量守恒定律(或磁场的高斯定律)。这两个定律表述为:
\nabla \times \mathbf{E} &=-\frac{\partial \mathbf{B}}{\partial t} \\
\nabla \cdot \mathbf{B} &= 0
\end{align}
要求解的安培定律为:
矢量势公式用于磁场物理场接口。
标量势公式仅适用于电流密度为零的区域。针对本文讨论的旋转机械,我们引入了标量场V_\textrm{m}(磁标量势,不要与电势混淆),并且这个公式将磁场定义为标量势的梯度。有了这个定义,就会自动计算安培定律,以及磁通量守恒定律。标量势公式用于磁场,无电流物理场接口。
与矢量势公式相比,标量势公式引入的自由度较少,因此求解的问题“更简单”。当然,其缺点也很明显,只能用在无电流区域。通常,因为这个缺陷,标量势公式只适用于非常特殊的情况,如永磁体的稳态研究等。不过,由于应用了准静态近似,标量势公式还能用于瞬态分析中的非传导区域。
在三维模型的情况中,标量势方法具有另一个重要的优点。当与连续性特征这样的成对特征配合使用时,这个公式能确保磁通密度的耦合更加精确,而磁通密度正是磁力机械模拟的核心。
这两个公式可以一起使用,即将矢量势公式用于传导域或导电域,标量势公式用于空气缝隙和非传导域。因此称为混合公式,在三维模型中,由于标量公式提高了成对耦合的精度,所以这种方法特别有用。在二维模型中,对于平面内的磁场,用于矢量势和标量势的离散化方式很相似。所以在二维平面内的情况中不必使用混合公式。
旋转机械,磁接口默认将安培定律特征(即矢量势公式)应用到所有域,因为这是最通用的公式。将磁通量守恒特征(实现标量势公式)应用到空气缝隙和其他非传导性区域等无电流的域内,以替代安培定律。使用混合公式边界特征后会在标量势区域和矢量势区域间的界面上应用适当的条件。请注意,连续性对特征会耦合一致对两侧的相关变量,所以要确保两侧使用了相同的公式。为提高数值稳定性,将磁标势场度规修复特征应用于全部矢量势域,这是磁场接口中常见的做法。
“安培定律”特征仅应用于包含导电绕组的旋转部分的内部。注意,选定区域小于整个旋转部分,旋转部分延伸到切割边界。要提高精度,在一致对条件附近使用标量势公式。
混合公式非常简单明了,但请牢记它的数学背景和局限性。判断是否适用的最重要条件,也是最易出错的条件,即标量势只能表示不旋转的磁场(无旋磁场)。在实际情况中,标量势区域不可能存在完全围住(“锁住”)电流的闭合曲线。
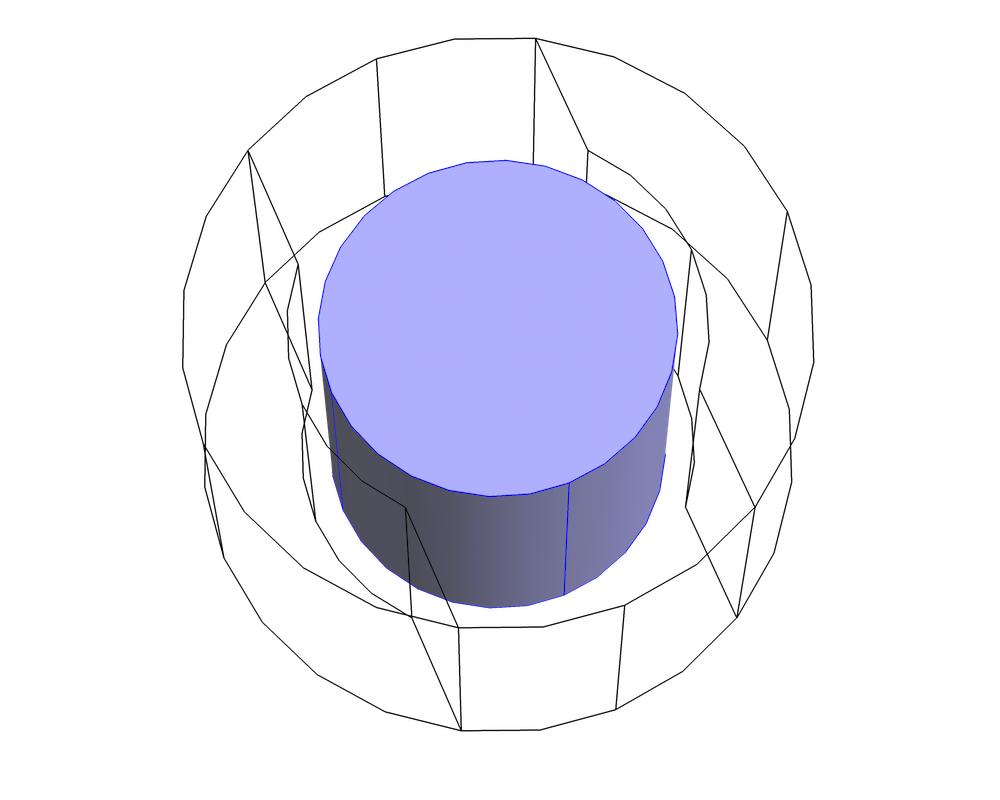
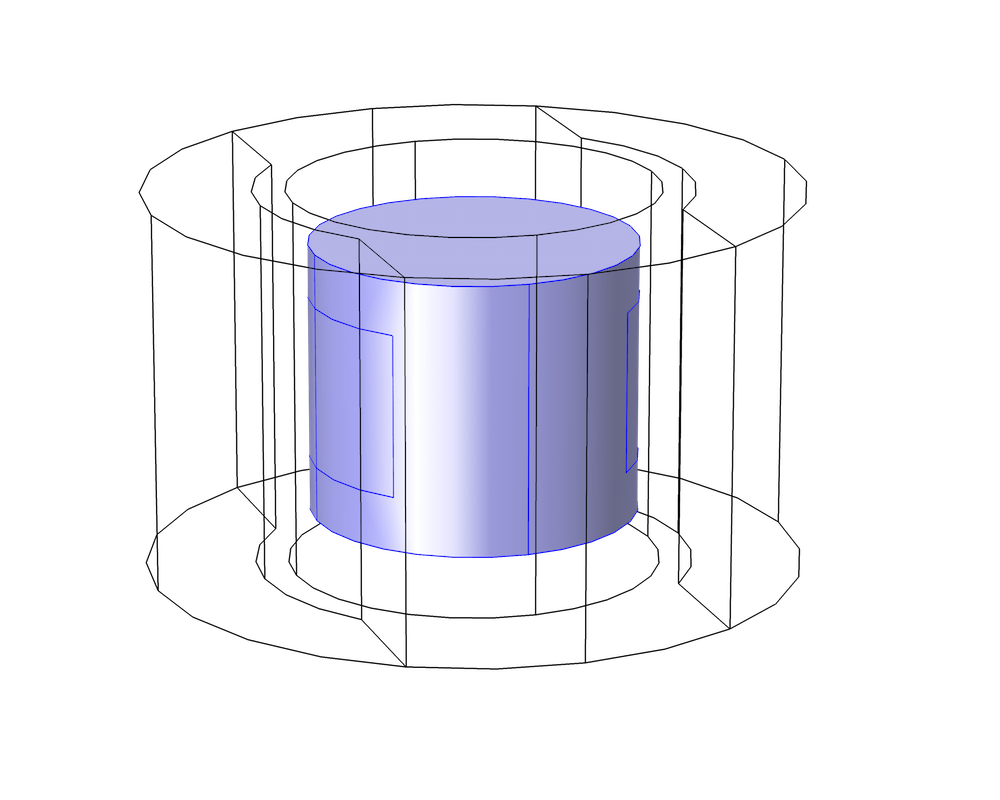
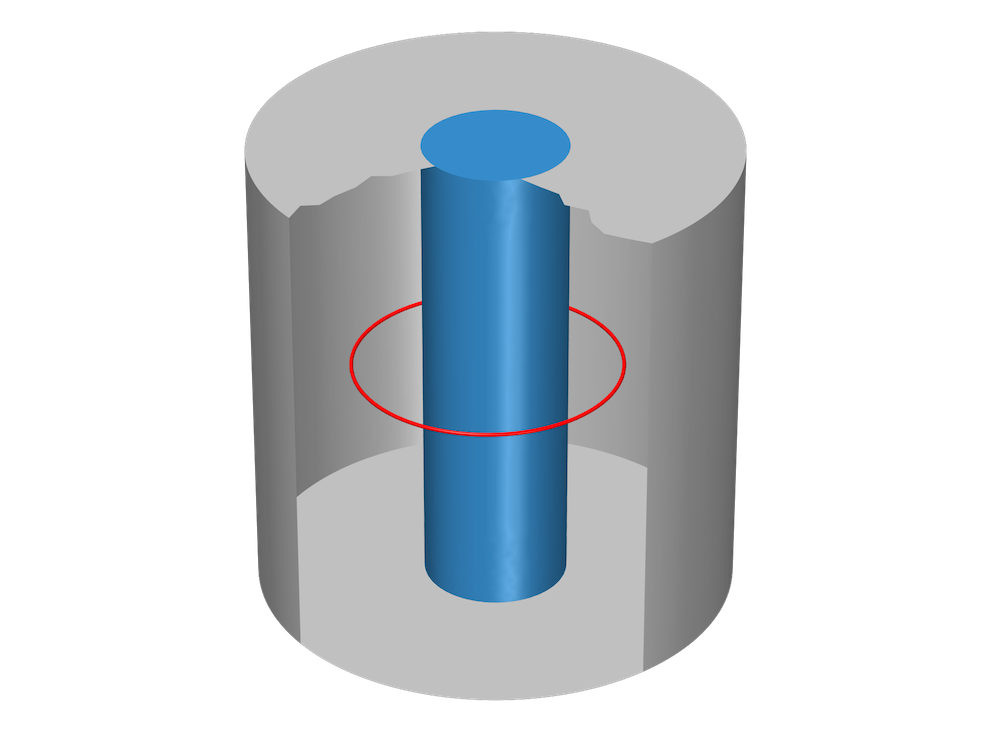
其原因来自标量势的定义和 Maxwell 方程。在使用标量势公式的区域,沿闭合曲线的磁场积分始终为零,因为磁场是标量势的梯度。与此同时,通过安培定律,我们知道沿闭合曲线的磁场积分必须等于该曲线围住的总电流。因此,除非围住的电流恰好为零,否则不会有解(也不可能有标量势的配置)。如果我们试图用 COMSOL Multiphysics 求解一个不满足此条件的问题,那么求解器不会收敛。下图阐明了这个概念,其中蓝色表示矢量势区域,灰色围住的是标量势区域。
标量势区域中一条闭合曲线“锁住”导电(电流返回路径在几何之外)的标量势区域。此模型可能无解。
下图为有效几何,其中标量势区域简单相连,意味着全程没有矢量势“漏洞”。
相对运动和框架
对于旋转机械而言,定子和转子的相对运动是机械运行的核心。相对运动物体的电磁问题并非不值一提,事实上,一百多年以前,正是这个问题推动了相对论的发展。
通常而言,解决这类问题的第一步是选择表述方程时所用的框架。框架即选择坐标系以及选择空间每一点的轴。一个很自然的选择是固定的笛卡尔坐标系,有时称为“实验室”框架,在 COMSOL Multiphysic 中称为空间框架。在这个框架中,静止部分固定不动,旋转部分运动。
另一个可能的选择是,将笛卡尔坐标系应用到空间的每一点,如同空间框架中的那样,不过随后要使坐标系跟随旋转点运动。在这个框架中,构成机械的材料始终静止(框架本身随之运动),所以称为材料框架。在机械的静止部分,空间框架和材料框架重合,因为这部分没有任何运动。而在旋转部分,材料框架相对于空间框架发生旋转。只要应用适当的变换,这两种框架产生的结果完全相同。
默认情况下,材料框架的坐标系为大写字母 (X,Y,Z),空间框架的坐标系为小写字母 (x,y,z)。坐标系的名称表示特定框架内矢量的分量;例如,电场分量在空间框架中表示为Ex、Ey和Ez,在材料框架中表示为EX、EY和EZ。
这一问题会自动用公式表示,并通过材料框架中的物理场求解。至于后处理,观察空间框架中的变量和各个物理场通常很有趣,因为定子始终静止,它与这几个物理量形成了鲜明的对比。因此,物理场会自动变换,并在空间框架中定义所有矢量场。空间变量和材料变量在表达式列表中表示为带括号的框架,如下图所示。
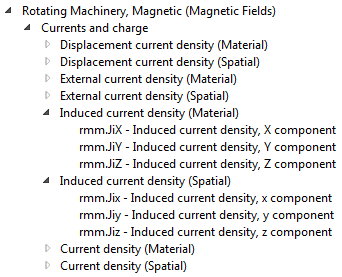
矢量物理量定义为空间框架和材料框架中的分量。
从材料框架变换到空间框架时,大多数矢量物理量仅进行旋转,而模保持不变。但电磁场,尤其是电场却并非如此,因为它们遵循洛伦兹变换规则进行变换。对于非相对论速度,用以下公式将这两个框架内的物理场关联起来:
\mathbf{B}_\textrm{material} &= \mathbf{B}_\textrm{spatial} \\
\mathbf{E}_\textrm{material} &= \mathbf{E}_\textrm{spatial} + \mathbf{v} \times \mathbf{B}_\textrm{spatial}
\end{align}
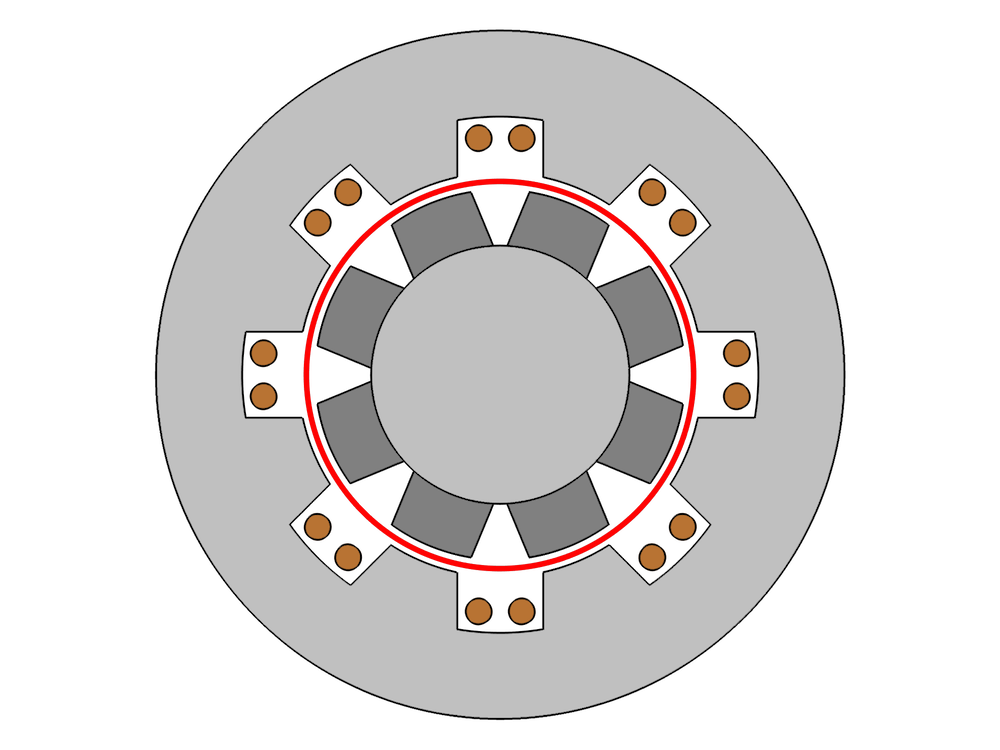
我们先观察二维发电机的几何。下图中,红线将旋转部分和静止部分分隔开。深色域表示转子中的永磁体,浅色域表示可饱和铁,铜域表示发电机的绕组。白色域表示空气。
传导性材料“观察到”材料框架中的电场,驱动电流密度。总之,这个电场与空间框架中的电场完全不同,如下图所示。
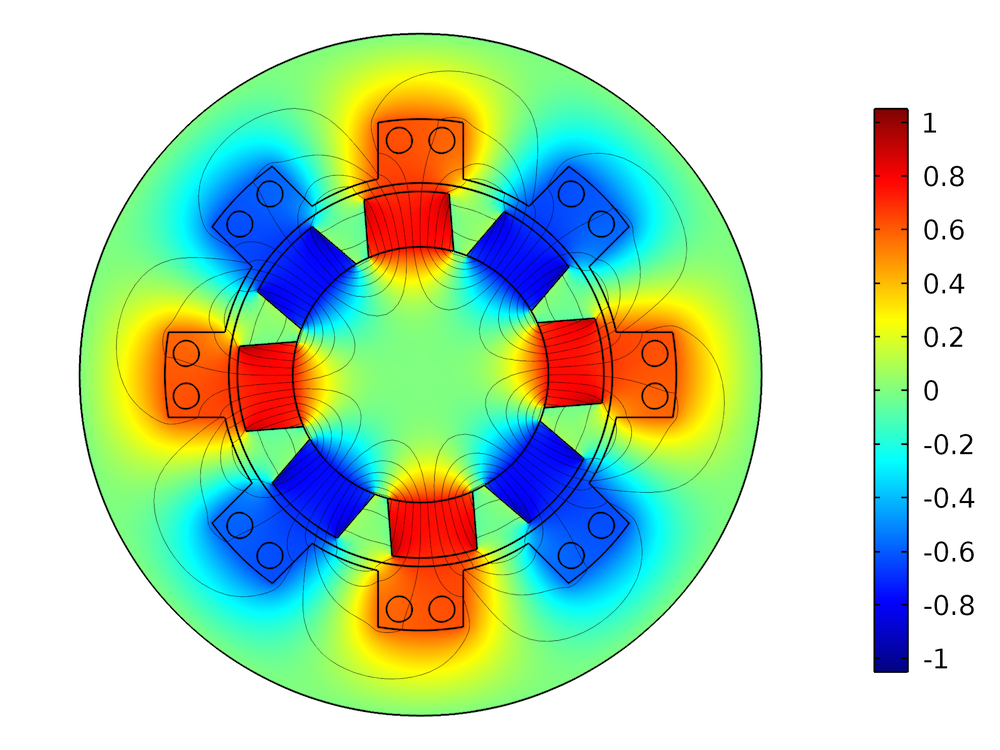
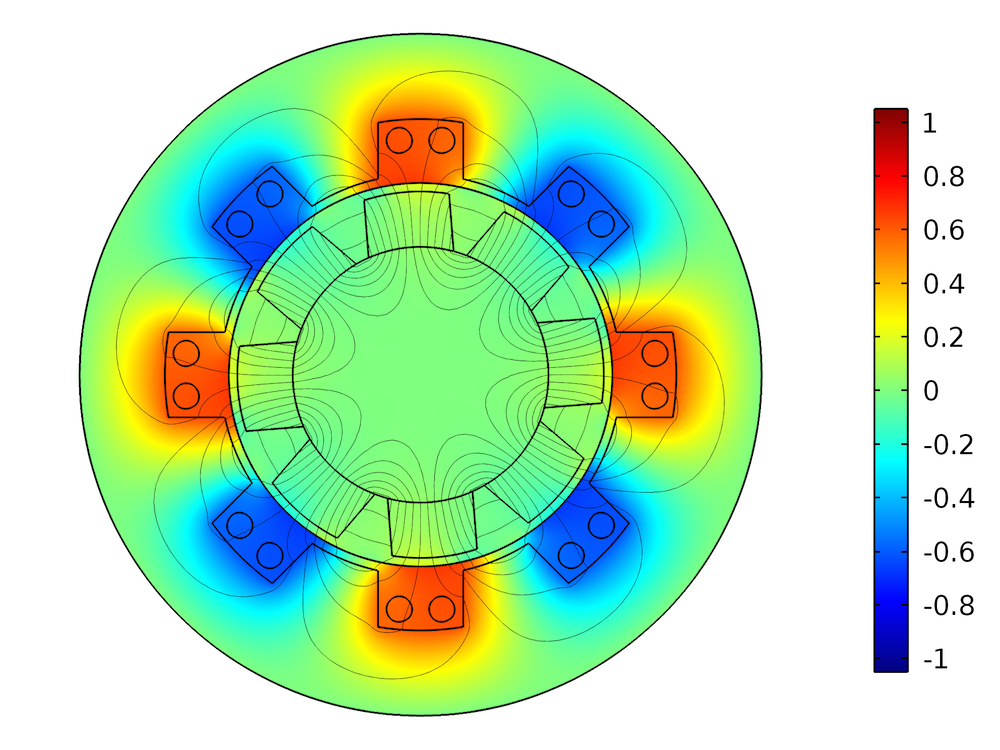
左图:旋转时空间框架中电场的平面外分量(单位: V/m)。转子中的磁体相对于实验室框架内的定子发生运动,因此产生感应电场。右图:材料框架中电场的平面外分量(单位 :V/m)。因为旋转部分的框架中磁体静止,所以不会产生明显的感应电场。静止部分的电场在材料框架和空间框架中完全相同。
设置求解器
求解器必须按照预期的仿真进行专门设置。稳态研究可用于模拟稳态条件下(即转子固定且瞬态效应消失后)旋转机械的行为。瞬态步骤则研究旋转时发生的情况。
使用瞬态步骤时,很重要的一点是指定正确的初始值,该值须经调查符合实际情况。如果这是研究的第一步,那么可以从初始值特征(默认设置为零)获取磁场的初始值。另一种方法是,在瞬态研究步骤之前求解“稳态”步骤,以使瞬态仿真的初始值不为零。
总之,如果激励“已激活”(例如发电机中的永磁体),则添加稳态步骤,这与激励在瞬态研究开始时才“打开”完全不同。在例如直流换向电机这样具有两种激励形式的模型中,一定要禁用会导致“稳态”步骤中产生瞬态激励的特征,也就是说,如果仿真的目的是模拟瞬态激励“打开”时的行为,则禁用这样的特征。
总结
模拟旋转机械在本质上是一个高级的、具有挑战性的主题。在本文中,我们展示了旋转磁力机械模拟时涉及的一些概念,以及处理此类有趣应用的步骤和最佳做法。旋转机械,磁接口和磁场接口构成了这一功能的核心,是分析和优化复杂系统的强大工具。
在之后的博客文章中,除了本篇提到的技巧之外,我们还会探讨扇形对称在三维旋转机械模拟中的作用。敬请关注!
延伸步骤
编者注:我们已于 2016 年 2 月 18 日更新了本主题的后续博客。从此处了解模拟三维旋转机械背后的核心概念。

评论 (0)