

身边没有传统洗衣机可用时,轻量型便携式洗衣机便是您的最佳选择。但如果洗衣机内的衣物放置不均匀,则洗衣机在运行时可能会变得不稳定,甚至出现“行走”。我们测试了便携式洗衣机旋转时的“行走”不稳定问题,并尝试通过主动平衡法来解决这一不稳定性。
轻量型机器
不是每个人的楼下都有洗衣房,也不是每个人都有精力(或时间!)把衣服送到自助洗衣店。您可能不希望把所有零钱都花在投币洗衣机上,或是不愿离开温暖的家去自助洗衣店。便携式洗衣机是解决这些问题的完美方案。不过,也并非没有缺点。这些机器非常轻便,如果衣服放置不均,则机器可能会失稳。
衣物在旋转中会产生离心力,从而使机器摇动。这个问题本可以通过增加洗衣机的重量来解决,但由于此类机器的设计初衷在于其便携性,因此这不是理想的选择。为获取更多信息,我们转向仿真寻求帮助。
模拟便携式洗衣机模型
针对此问题,我们选择对一个简化的横轴式滚筒洗衣机进行建模(横轴式模型中的不稳定问题比纵轴式更严重)。我们希望通过此模型来理解“行走”不稳定对正在旋转的洗衣机如何产生影响。为去除这一不稳定性,模型中使用了主动平衡方法。
模型假设
为了简化模型,我们做了若干假设。
关于滚筒和洗衣机的假设:
- 二者均为刚体。
- 绕滚筒轴的旋转是滚筒与洗衣机之间唯一的相对运动。
- 衣物与滚筒的旋转速度相同。假设的前提是滚筒的每分钟转数 (RPM) 足够高,从而产生了巨大的离心力。
关于机器与周围环境相互作用的假设:
- 洗衣机不会翻倒。在仿真过程中,它与地面保持接触。
- 使用含恒定摩擦系数的库伦摩擦模型来模拟洗衣机与地面之间的摩擦。
设计模型几何
设置模型时,我们需要注意每个组件的位置。应在滚筒的前后两侧都应用平衡质量,但为了简化建模过程,我们仅在滚筒的前侧应用平衡质量,以保证质心移到滚筒的质心。在计算质量时,我们需要记住,滚筒的质量要加到衣物的质量上。
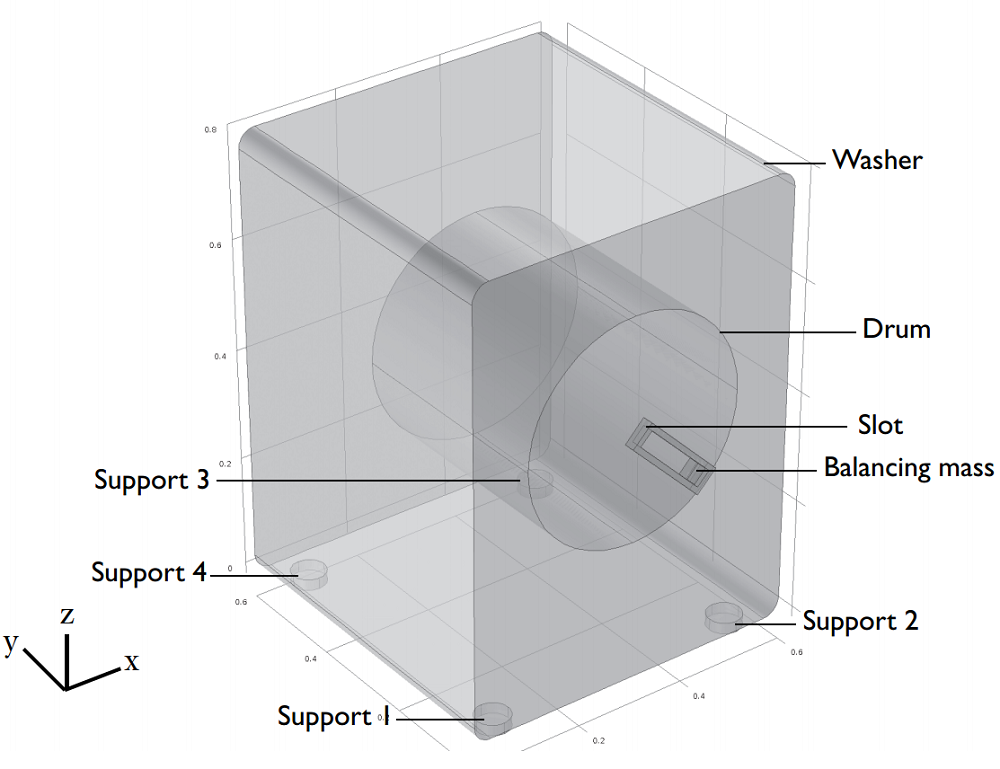
滚筒通过铰链关节与洗衣机和卡槽相连接,并通过棱柱关节将卡槽与平衡质量连接起来。要实现主动平衡,必须具备用于连接滚筒与卡槽的铰接关节以及棱柱关节,我们将在下文中进一步学习。(请注意,由于模型中未使用棱柱关节,因此它始终处于锁定状态,滚筒/卡槽连接仅在系统中不存在平衡点时锁定。)
洗衣机的四个支撑脚使用平面连接功能,将洗衣机连接至地面上的四个独立点。由于关节富有弹性,因此我们能够独立分析所有关节上的铰力。
滑移裕度与主动平衡
洗衣机模型的不稳定性可能造成多种滑移。但出于本次模拟的需要,我们将重点关注旋转滑移与不稳定性,因为发生旋转滑移的临界速度要低于平动滑移。
我们使用滑移裕度来测量模型的稳定性。滑移裕度是最大可能摩擦力与实际摩擦力之差。在我们的示例中,它决定了要避免“行走”不稳定性所需的临界运转速度。当滑移裕度接近零时,将发生“行走”不稳定性。当超过三个支脚中的滑移裕度均为零时,机器将发生滑移。
为使机器更平稳,我们首先要消除那些使洗衣机不稳定的因素。作用在旋转衣物上的净不平衡离心力是造成洗衣机滑移的元凶。要解决这一问题,我们可以施加一个相同大小的反向力。此时会用到主动平衡。
为使机器内的力平衡,我们调整了平衡质量的角度与径向位置。角度修正可以修正离心力的方向,并可通过旋转滚筒中的卡槽平衡质量来实现。径向位置可通过平移卡槽中的平衡质量来调整离心力的大小。在此仿真中,只需进行角度修正,因为已根据衣物的重量设置了平衡质量的径向位置。
我们的模型可以轻松使用主动平衡。由于模型的角滚筒转速和加速率已知,我们可以在指定的时间激活平衡系统,而非等待滑移裕度接近零。
结果
综合之前提到的所有因素,我们运行了仿真。首先,查看了没有主动平衡辅助的洗衣机:
")
")
左:洗衣机旋转(放大 100 倍);右: 洗衣机支脚处滚筒的旋转与摩擦力。
接下来,当仿真中加入主动平衡后,我们通过两种方式来查看洗衣机中的总不平衡量,以了解到底发生了什么。
第一张图显示了旋转框架中的不平衡,并显示主动平衡与减少失衡之间明显相关。在固定框架图中也观察到类似效应。
")
")
左:旋转框架中的总不平衡量;右:固定框架中的总不平衡量。
我们还查看了模型的滑移裕度。首先,我们分析了没有主动平衡辅助时单个支脚间的差别,对比了洗衣机前侧一个支脚(支脚 1)与后侧一个支脚(支脚 3)的滑移裕度。下方左侧绘图表明,包含前支脚的洗衣机的滑移裕度较低,因此与包含后支脚的洗衣机相比更易滑动。
扩大参数范围以查看模型的总滑移裕度,我们发现,总滑移裕度会在短时间内变为零。这意味着洗衣机将在这段时间出现“行走”不稳定性。右侧绘图显示在激活主动平衡时,总滑移裕度会增加。
")
")
左:没有主动平衡时,支脚 1 和支脚 3 的滑移裕度;右:应用和未应用平衡时,洗衣机的总滑移裕度。
观察洗衣机沿纵轴的运动时,能更清楚地看到主动平衡所提供的帮助。平衡机制消除了旋转不稳定性。
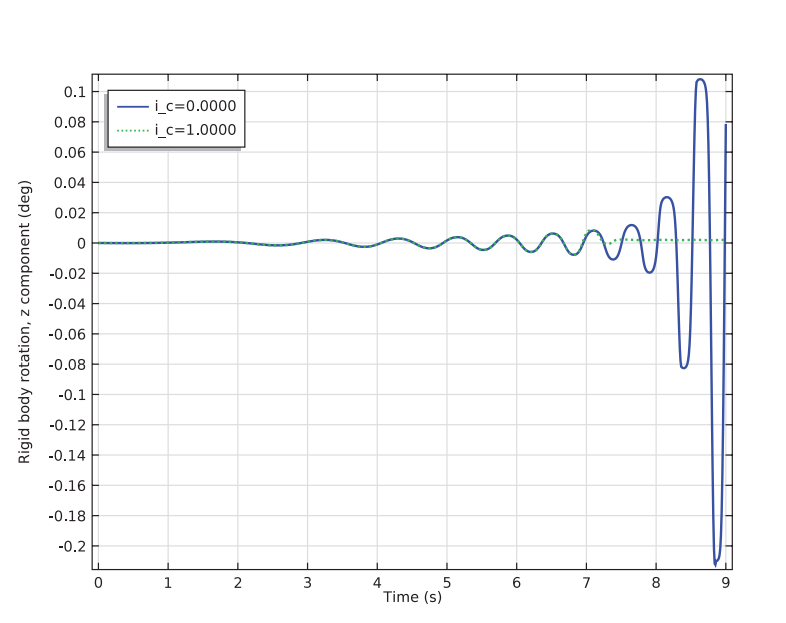
应用和未应用平衡时洗衣机的 Z 轴旋转。
我们还对便携式洗衣机的其他方面进行了建模。查看滚筒和校准马达的每分钟转数 (RPM) 时,我们发现,通过在需要时启动校准马达、并在系统稳定后将其停止,可以使校准马达高效工作。我们还计算了用于稳定系统的合适修正角。
")
")
左:校准马达和滚筒的 RPM;右:主动平衡系统中的必要修正角。
创建主动平衡系统有助于模型避免在旋转周期的“行走”不稳定性和旋转滑移效应。现在,您可以亲自尝试这一操作,通过以下链接下载模型并开始体验吧。
扩展阅读
- 模型下载:洗衣机中的“行走”不稳定性
- 相关博客:模拟洗衣机中的振动和噪声

评论 (0)