
当大多数人想到音叉时,首先想到的就是音乐,因为这种装置的共振频率可以用来给乐器调音。作为一名 MEMS 工作者,你更有可能想到的是一个微型陀螺仪,它是由两个音叉结构连接组成。大规模生产的 MEMS 陀螺仪为角速度测量提供了一种经济、实惠的选择,例如用于汽车系统防滑控制的横摆角速度传感器。我们可以使用仿真测试这些设计,并优化它们的机械系统设置。
MEMS 陀螺仪
MEMS 装置本质上是由两个音叉组成,它们共同作为一个速率陀螺仪工作。这两个元件由压电材料组成。本文所讨论的模型中,材料是石英。
速率陀螺仪可以感知系统的旋转运动和角速度。在这种压电速率陀螺仪中,音叉的共振模式被用于产生测量信号。
它采用了两种谐振模式:
- 驱动模式
- 感应模式
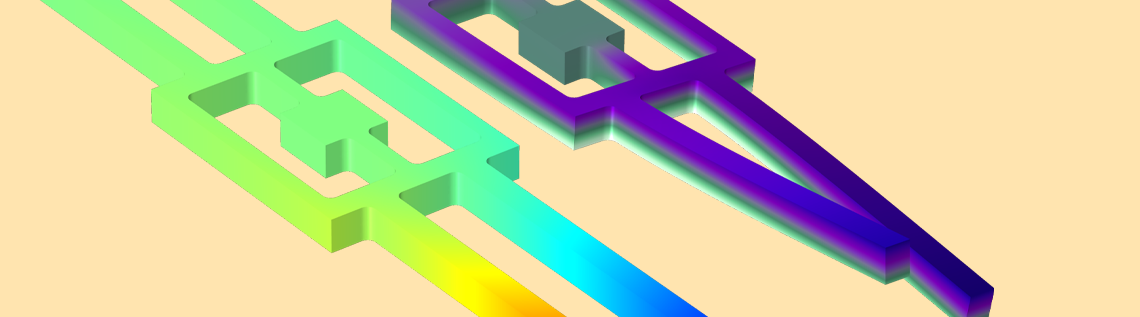
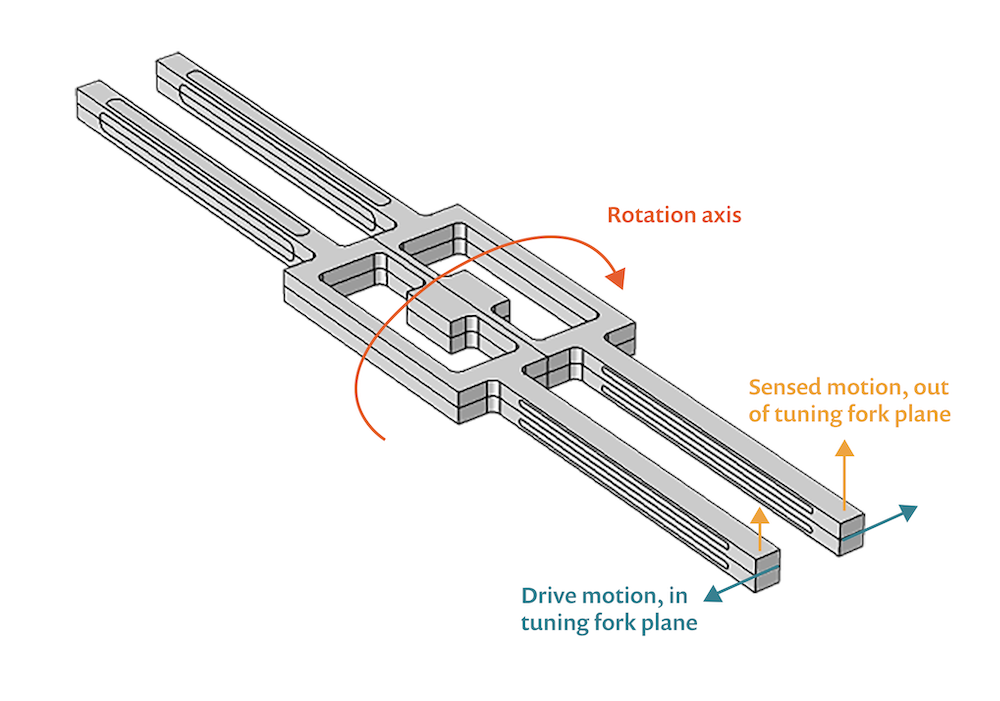
这两种模式作为陀螺仪的驱动和传感。在操作中,音叉通过由沉积在驱动齿表面上的电极施加的电场,以驱动模式的共振频率驱动。驱动齿在音叉平面,即xy平面中振动。在感应模式中,感测齿在音叉平面外振动,沿z轴振动。位移如下面的一组图像所示。


驱动模式(左)和感应模式(右)中音叉的位移方向。
当陀螺仪围绕y轴旋转时,平面外感应模式的移动是由科里奥利力的影响引起的。逆压电效应用于驱动面内模式,而面外运动则由直接压电效应感应。
从本质上讲,这些不同的零件工作有助于系统检测倾斜的方向以及自我纠正到稳定或平衡的方向。平衡有助于确保某些机械系统的安全并避免被损坏,同时在其他系统中实现正确的定位。这种能力是 MEMS 陀螺仪用于某些防滑控制系统以及翻转检测的原因。
设置 COMSOL Multiphysics®模型
如上所述,压电速率陀螺仪在系统旋转时进行感应。在这个模型中,我们通过简化分析来模拟系统的运行方式。
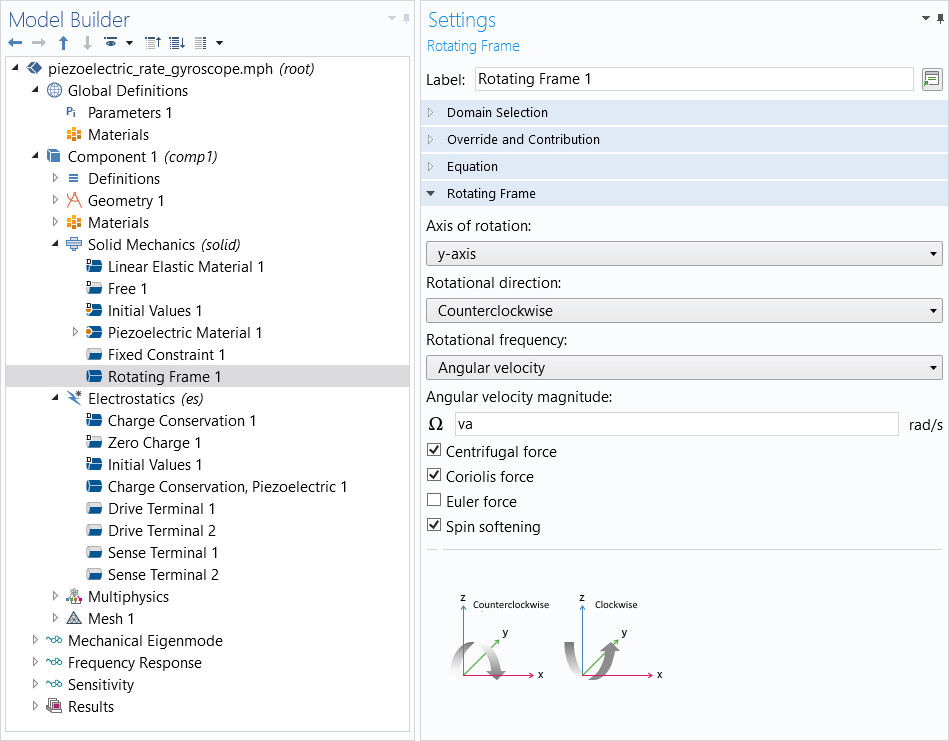
在 COMSOL Multiphysics®软件中对压电速率陀螺仪进行建模时,添加一个旋转参考系用于考虑安装设备的特定旋转体。这可以通过添加旋转参考系节点来完成。建立参考系的属性后,可以通过选择相应的复选框考虑科里奥利力。科里奥利力使音叉在感应模式的面外运动中振动。
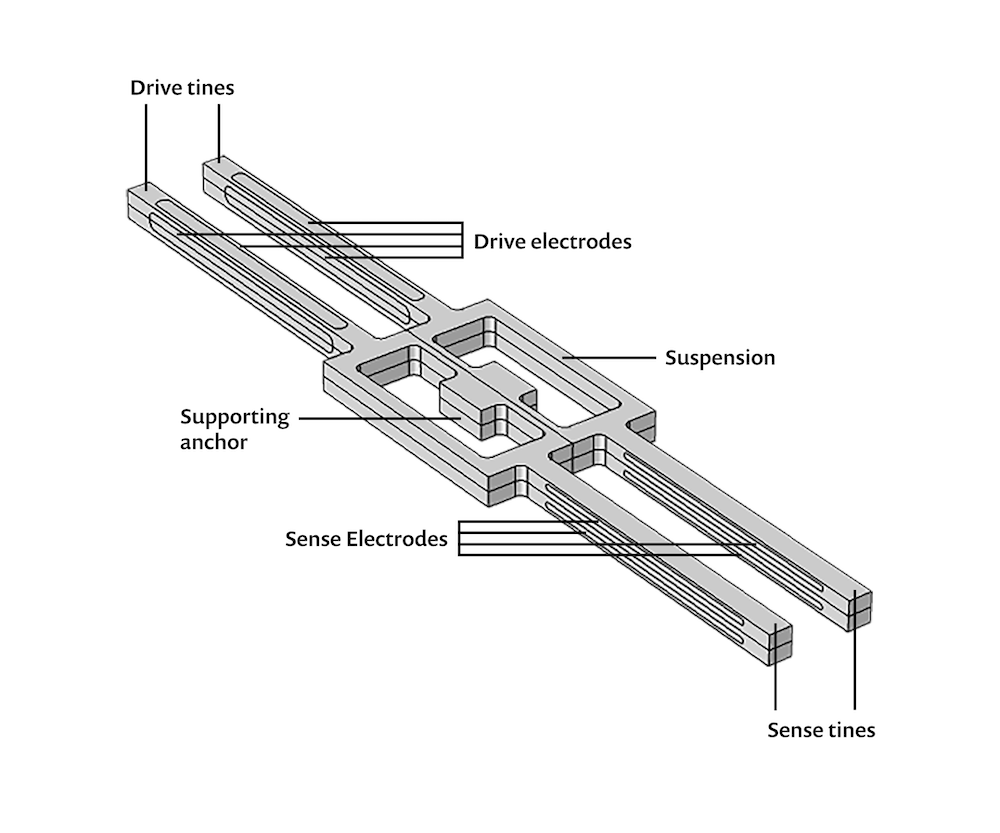
音叉上的电极需要根据装置的压电材料——石英晶轴,以特定的方式进行图型设计。这一点很重要,这样就可以使驱动齿在适当的方向上弯曲,并且感应信号可以从感应齿中分离并快速提取出来。
静电物理场接口提供驱动电压并通过电极获取感应电压。电极产生电场,驱动音叉齿条在平面内弯曲运动。在感应齿条中,电极图案检测感应模式的面外运动。结构力学和静电学通过压电效应多物理场节点耦合。
提示:在开发模型时,有时最好先使用较粗的网格,以便快速获得结果。然后,可以返回并创建更精细的网格以生成更准确的结果。使用粗网格有助于以对称方式构建几何,并使用复制和粘贴功能来构建对称网格,从而在数值上保持物理的对称性。
结果与讨论
结果显示了在给定的角速度下,感应电压作为驱动频率的函数发生了多少变化,以及在固定的驱动频率下,感应电压作为角速度的函数发生了多少变化。


左:感应电压与驱动频率。右:感应电压与角速度。
通过仿真能够更有效地找到最佳设计,因为无需使用原型就可以针对任何目标进行调整。使用 COMSOL Multiphysics,可以模拟真实场景来测试特定的设计,并针对特定系统进行优化。
自己尝试
尝试自己动手模拟压电速率陀螺教程模型:

评论 (4)
梅梅 韩
2024-04-01输出的感应电压信号是一个复数的信号,它的实部和虚部分别表示什么?具体怎么看这个复数信号?如果仿真时虚部的信号很大而实部信号很小这可能是由于什么原因导致的,这种情况是正确的吗?如果不正确有可能怎么改善这个情况呢?
Hao Li
2024-04-03 COMSOL 员工您好!
感谢您的评论。
频域研究中,实部表示当前大小,虚部表示相位,模值表示大小。
“虚部的信号很大而实部信号很小”是正常现象。
如果有进一步问题,建议您联系COMSOL的技术支持团队:
在线支持中心:www.denkrieger.com/support
Email:support@comsol.com
谢谢!
梅梅 韩
2024-04-07在频域研究时,对灵敏度的研究一般是使用两个端子的感应电压模做差分的公式,但是仿真出来的两个端子感应电压的虚部差距很大,这个是什么原因?
Hao Li
2024-05-16 COMSOL 员工您好!
感谢您的评论。
仅根据您的描述,我们不能判断原因,建议您可以详细描述仿真目的并将模型发送到Support系统中,以帮助我们给您提供具体建议。www.denkrieger.com/support
如果有进一步问题,建议您联系COMSOL的技术支持团队:
在线支持中心:www.denkrieger.com/support
Email:support@comsol.com
谢谢!