
COMSOL Multiphysics®软件的 6.0 和 6.1 版本对屈曲分析的主要功能进行了改进。6.0 版本增加了在分析中包括几何缺陷的功能,6.1 版本则新增了分离固定的(“静态”)和变化的(“动态”)载荷的功能。在这篇文章中,我们将详细探讨对这类载荷的分析。
编者注:在之前的博客“屈曲,当结构突然倒塌时”中,我们介绍了屈曲分析的各个方面,并讨论了一些更专业的屈曲分析技术。这篇博客提供的信息适用于 COMSOL 软件 6.0 版本以前的用户。
包括几何缺陷
众所周知,由于存在几何缺陷,一些结构对屈曲的承载能力会显著降低。在现实生活中,结构中总会存在一些制造缺陷。另外,施工过程中的安装不完善,或者结构可能因服役载荷效应而发生变形。因此,考虑缺陷很重要。
对此,我们有不同的方法。对于一个简单的结构,例如单个支柱,可以将它假设为其他相似的几何形状。如果要将缺陷包含在模型中,可以直接创建包含该缺陷的几何结构,也可以先构建一个完美的几何结构,然后添加包含指定变形节点的变形几何接口。
对于更复杂的结构,一般很难创建包含缺陷的几何结构。一种解决方案是进行线性屈曲分析,然后使用一种或多种屈曲模式作为缺陷。这样做的前提是,结构对屈曲模式本身很敏感。
请注意,在研究缺陷的影响时,通常不能使用线性屈曲分析。需要逐步增加载荷,直到结构失效。变形是渐进的,因此失效准则通常是最大允许位移或应力。
从 COMSOL Multiphysics 6.0 版本开始,有一种可以自动设置基于屈曲模式缺陷研究的方法。让我们来看看如何设置这种研究。
基于缺陷建立研究的 7 个步骤
第 1 步:从线性屈曲分析开始
我们先从构建一个理想结构的普通线性屈曲分析开始。如果要在缺陷形状中包含比第一个屈曲模式更多的屈曲模式,就需要更改待求的屈曲模态数(默认值为 1)。
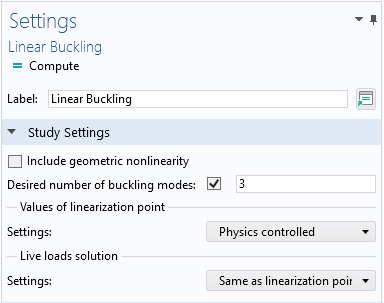
更改待求的屈曲模态的数量。
步骤 2:添加屈曲缺陷节点
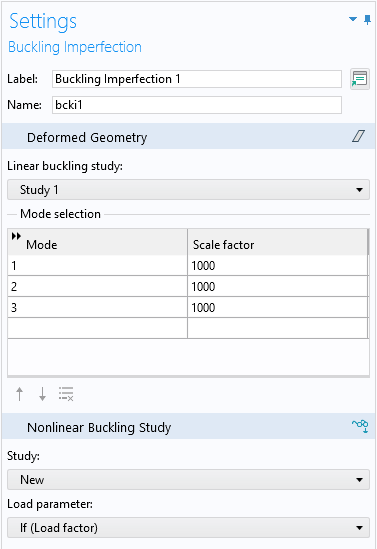
现在,屈曲模式和相应的临界载荷因子已经设置好了,下一步是在定义下添加一个屈曲缺陷节点。

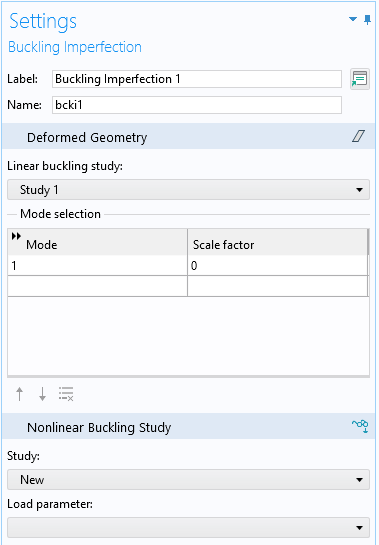
左图显示了如何添加屈曲缺陷节点,右图显示了新添加节点的设置窗口。
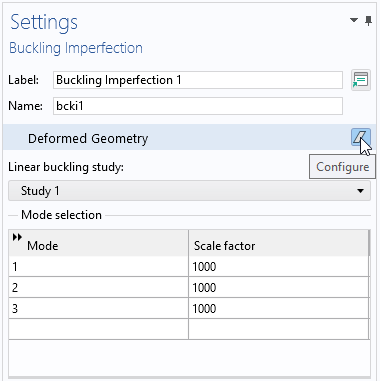
步骤 3:输入模式编号及它们的比例因子
现在需要调整添加的屈曲缺陷节点的设置,包括输入模式编号和比例因子。要确定合适的比例因子,首先需要知道屈曲模式的最大挠度。屈曲模式的大小是任意的,因此求解器在求解时会成比例地缩小屈曲模式的位移大小,以方便计算。默认情况下,模式会被缩小,使最大位移为几何图形对角边界框长度的 10-6倍。
实际的缺陷大小应反映真实结构的几何质量。或者,缺陷的大小可以通过一些设计规范给出。假设真实的几何形状尺寸可能与理想形状相差 2mm,该几何尺寸为 1m。如果使用单屈曲模式,比例因子将为 2000。如果使用多种模式,那么为所有的模式都分配 2000 的比例因子可能是保守的,因为这些值会相加。这是不可忽略的,因为某些模式可能会在相反的方向上起作用。我们可能需要检查模式,甚至为其中一些模式分配负比例因子来获得预期的形状。
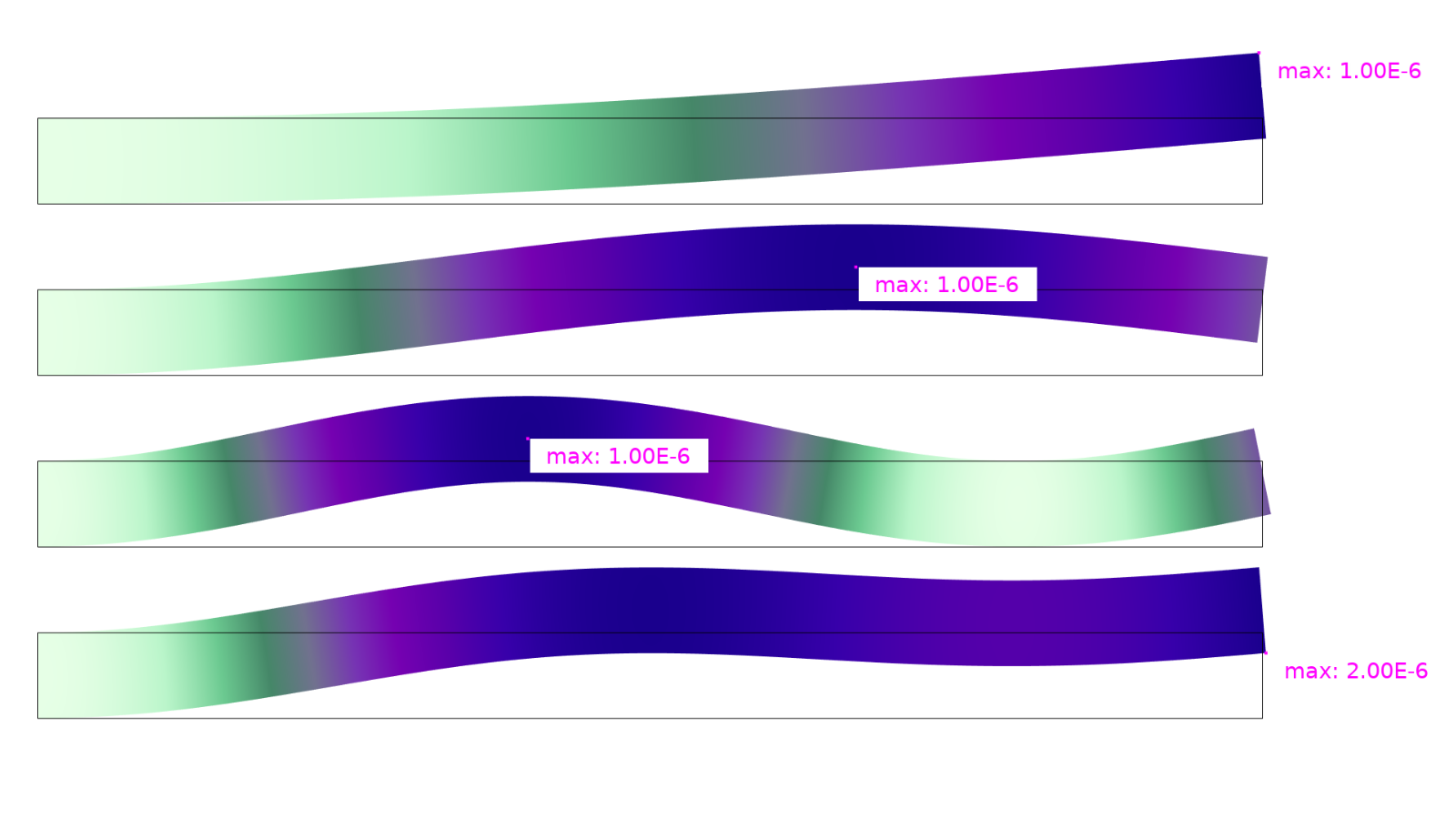
从上到下,前三个图显示了 Euler 2 悬臂梁的前三种屈曲模式,底部的图显示了这些模式的纯叠加。标记显示了最大垂直位移。(您可以通过从案例下载页面下载模型的 MPH 文件euler2_buckling_imperfection.mph,尝试自己建模。)
步骤 4:配置变形几何体
接下来,我们来设置变形几何。首先,单击屈曲缺陷设置中的变形几何上部的配置按钮。
创建变形几何结构。
这样,特殊配置了指定变形的变形几何节点将被添加到模型开发器树中。
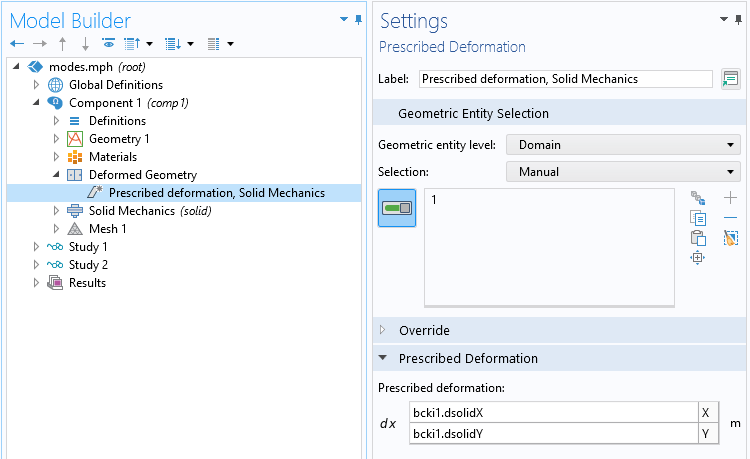
新添加的指定变节点。
如果要更改包含的模式、比例因子或重新运行线性屈曲研究,则无需重复这个步骤。
步骤 5:创建加载参数
添加一个将充当载荷的乘数的参数,然后将该参数插入到用于线性屈曲分析的所有载荷特征中。
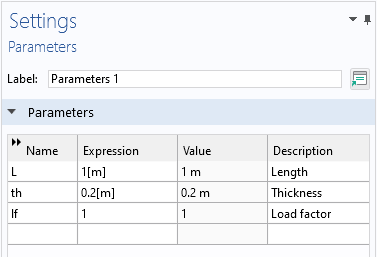
添加了一个新的参数lf,并用作所有载荷的乘数。
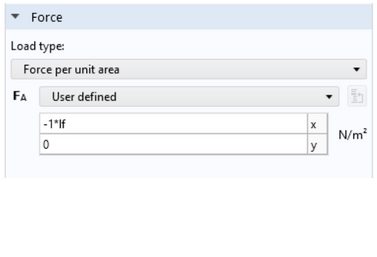
接下来,在载荷参数拉菜单中选择If(载荷因子)参数。
载荷因子已经选择好了。
步骤 6:配置新的屈曲研究
要为包含缺陷的增量分析创建研究,请单击屈曲缺陷分析中的非线性屈曲研究上部的配置按钮。
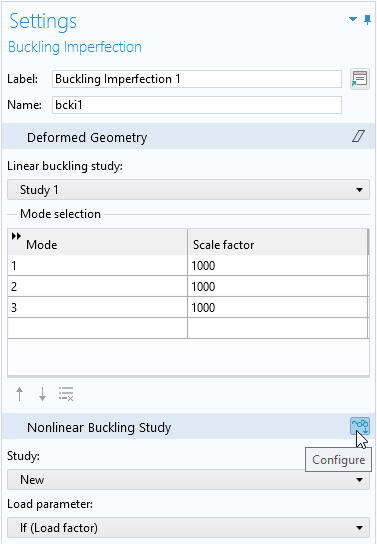
创建非线性屈曲研究。
现在,我们已经创建好了一个新研究,并进行了一些特殊设置:
- 包括几何非线性。
- 使用选定的载荷参数进行辅助扫描。
- 基于计算屈曲模式的最低临界载荷因子建立参数值列表。使用这些设置后,最大载荷比线性屈曲研究的预测值高出约 10%。
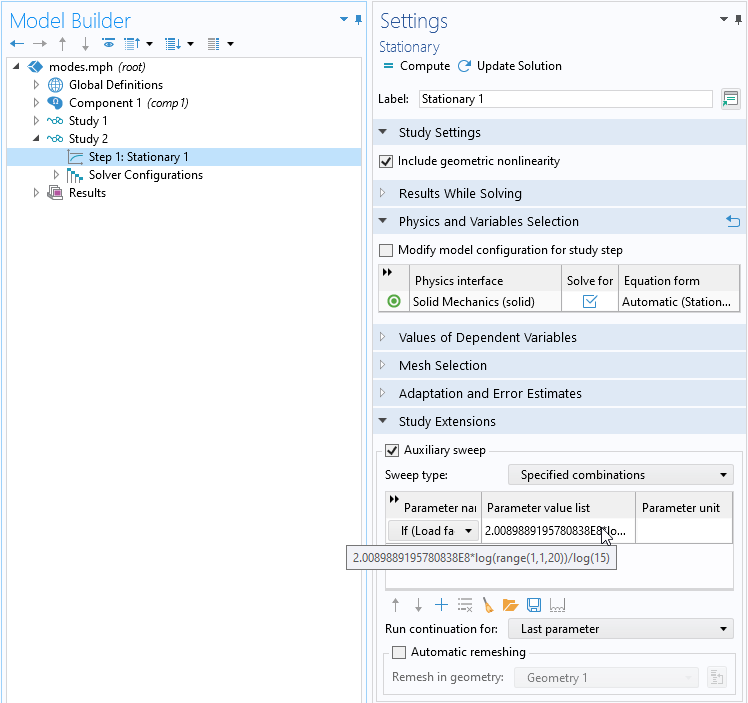
新研究的设置窗口。
步骤 7:运行研究
该研究在较高的载荷水平下可能无法收敛。这通常意味着到目前为止已经远远超过极限负载了,但中间步骤仍会被存储并可用于计算。
对于非线性屈曲分析,没有唯一的临界载荷。通常,需要根据载荷参数绘制相关的位移和应力曲线,并基于结构的物理特性使用失效准则。
下列示例与用于表示上述三种屈曲模式(长度为 2m 的悬臂梁)的 Euler 2 示例相同。假设最大允许的尖端位移为 10mm,最大允许的 von Mises 等效应力为 400 MPa。
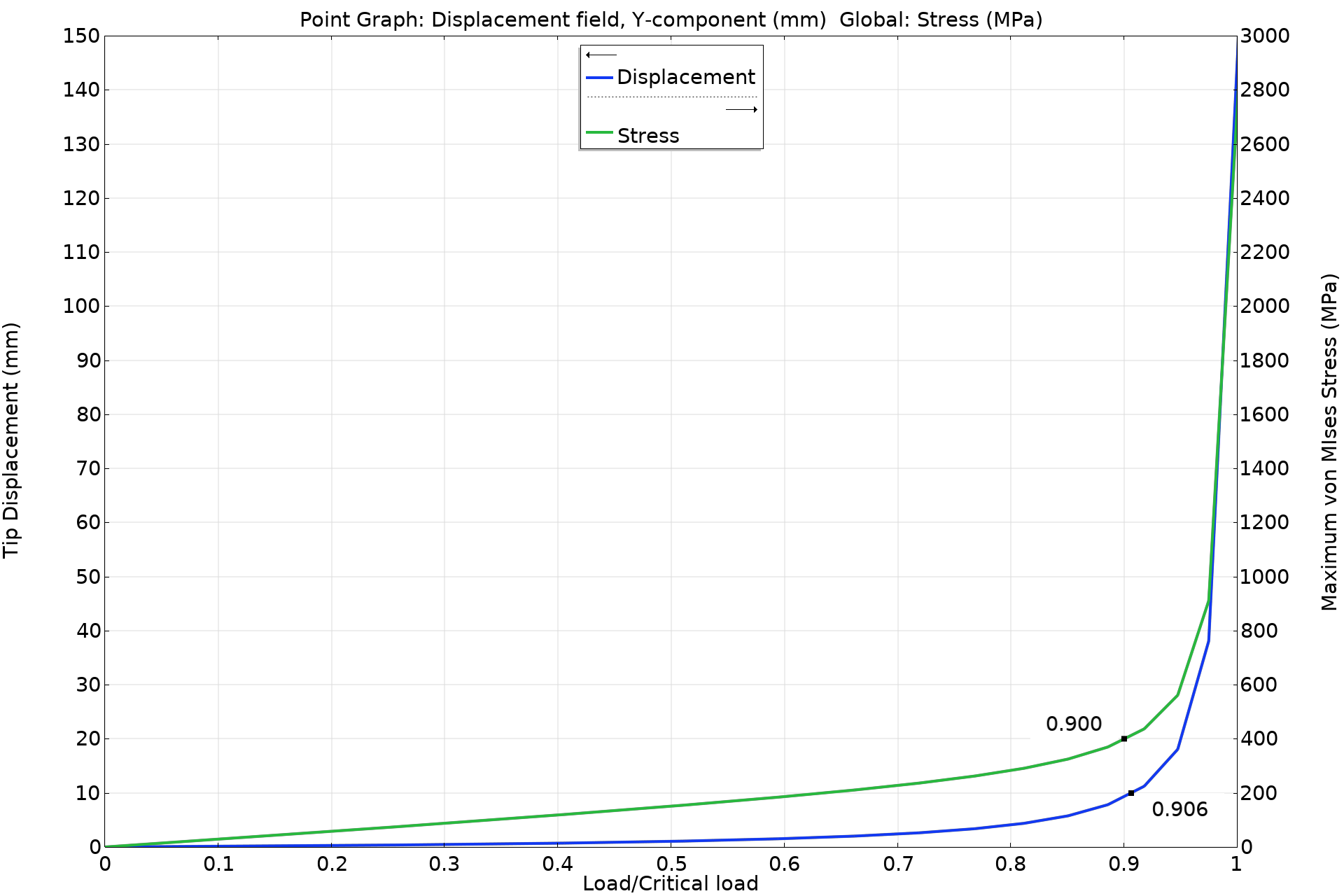
显示载荷参数与位移和应力关系的曲线图。屈曲分析产生的临界载荷因子对水平轴进行了归一化处理。图中的标记点分别显示了失效准则的位移为 10mm,应力为 400 MPa。
下表显示了选择不同屈曲模式缩放时的临界载荷值的比较。
| 比例因子,模式 1 | 比例因子,模式 2 | 比例因子,模式 3 | 最大缺陷(mm) | 临界载荷(位移) | 临界载荷(应力) |
|---|---|---|---|---|---|
| 1000 | 1000 | 1000 | 2 | 0.906 | 0.900 |
| 2000 | -2000 | 2000 | 2 | 0.832 | 0.846 |
| 2000 | 0 | 0 | 2 | 0.906 | 0.900 |
| 1000 | 0 | 0 | 1 | 0.907 | 0.908 |
| 20000 | 0 | 0 | 20 | 0.326 | 0.451 |
可以看出,中等水平的缺陷对实际选择生成模式的敏感性是有限的。
这个例子很简单,而且 Euler 支柱对缺陷不是很敏感。壳结构在这方面通常问题更大,所以接下来,我们来探讨一个壳示例。
一个更高级的示例
在这个示例中,考虑一个直径为 1.5m、高度为 2m 的钢圆柱体,其壁厚度为 10mm,并有两个厚度为 20mm 的加强环。使用轴对称壳单元进行分析。(您可以通过 COMSOL案例下载页面下载相关的 MPH 文件cylindrical_shell_buckling_cleared.mph,来探索这个模型。)
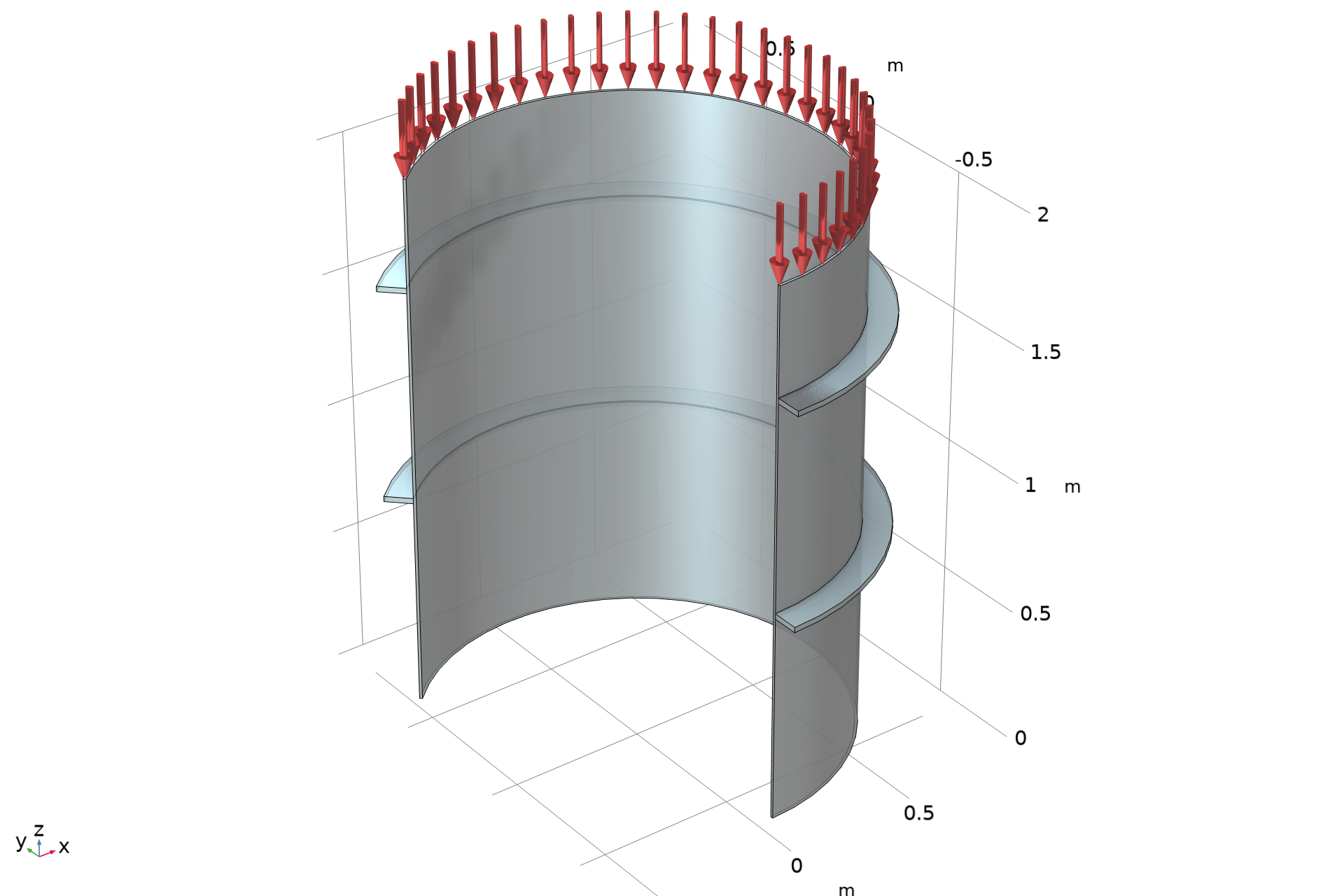
几何形状和载荷。圆柱体的下端是固定的。
许多屈曲模式具有相似的临界荷载因子。
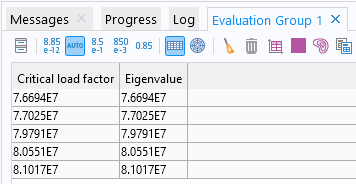
前 5 种屈曲模式对应的临界荷载因子。
在这种情况下,检查不同的缺陷模式很重要。可以通过在模式编号上添加外部参数扫描来自动进行这项操作,如下图所示。
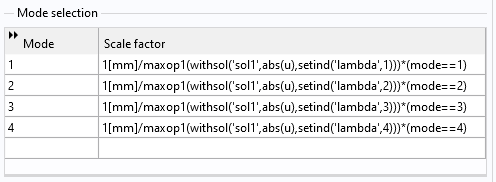
屈曲缺陷节点中的模式选择表格。
关于这个表格,需要考虑以下信息:
- 将类型(
mode==1)的布尔表达式作为过滤器,来检查哪种模式将使用缺陷。mode是扫描参数。 - 设计比例因子,使每种模式的峰值都变为 1 mm。
- 使用最大算子
maxop1(在非局部耦合→定义下添加)获取每个屈曲模式在径向方向上的最大位移。 - withsol算子的目的是从特定解中选取结果。在这个示例中,它被用来检索单个屈曲模式。(阅读 COMSOL 学习中心的文章 “withsol 算子的示例”,了解关于这个算子的更多信息。
现在,非线性分析包括将前 4 种模式的外部扫描作为缺陷,以及每种模式的载荷都会增加的相同的内部辅助扫描。由于任何非线性解都可能无法在较高载荷下收敛,因此必须设置参数化扫描,使整个分析不会因此而失败。
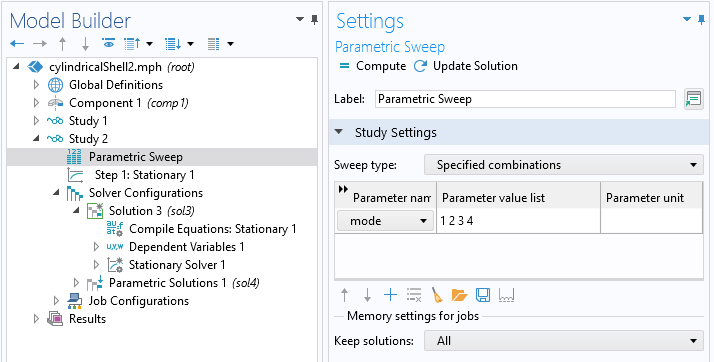
非线性研究和参数化扫描节点。
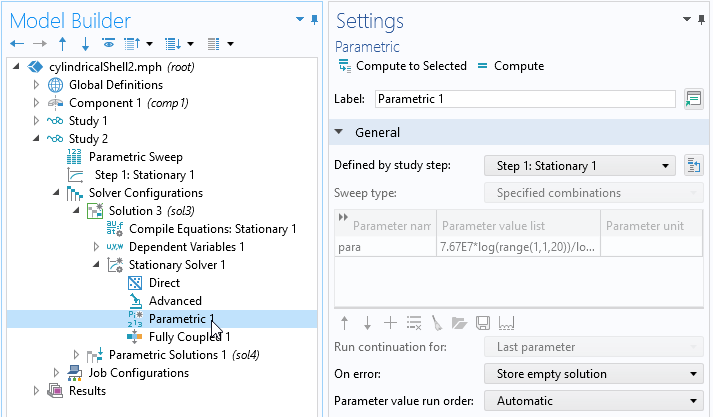
在参数化节点中,必须将误差选项设置为存储空解。
现在,我们可以绘制所有情况下的最大应力和位移的变化。
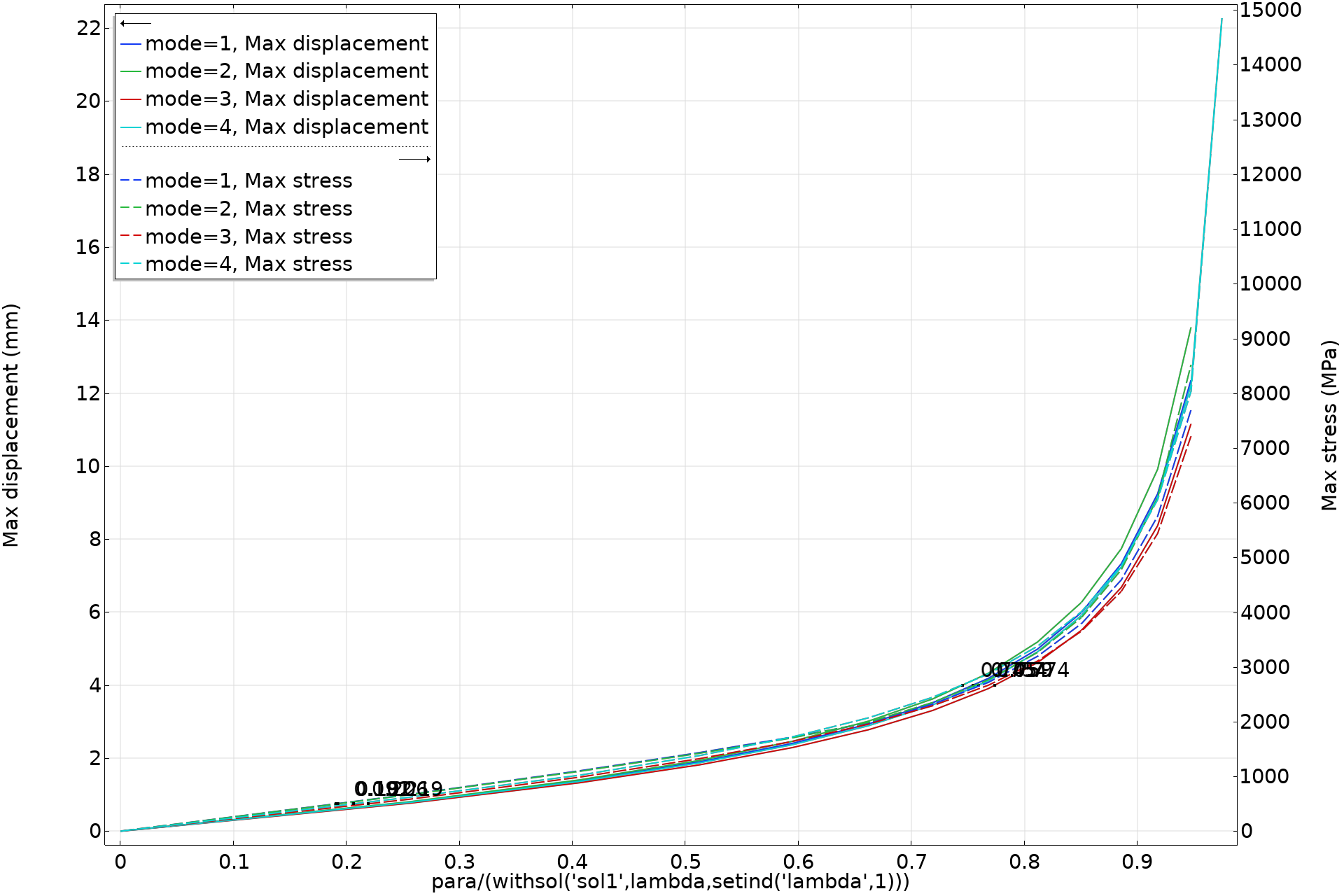
显示了位移和应力归一化处理后施加载荷的曲线图。
在这个示例中,允许的应力在所有情况下都是在相当低的外部载荷下被超过的。在线性区域已经能够看到这种情况。最终的结果是,这种结构将在屈曲发生之前由于塑性坍塌而失效。有可能通过在模型中加入塑性来完善分析。
从这个示例中,我们可以看到,使用非线性分析的变形很大程度上与实际的变形一致。
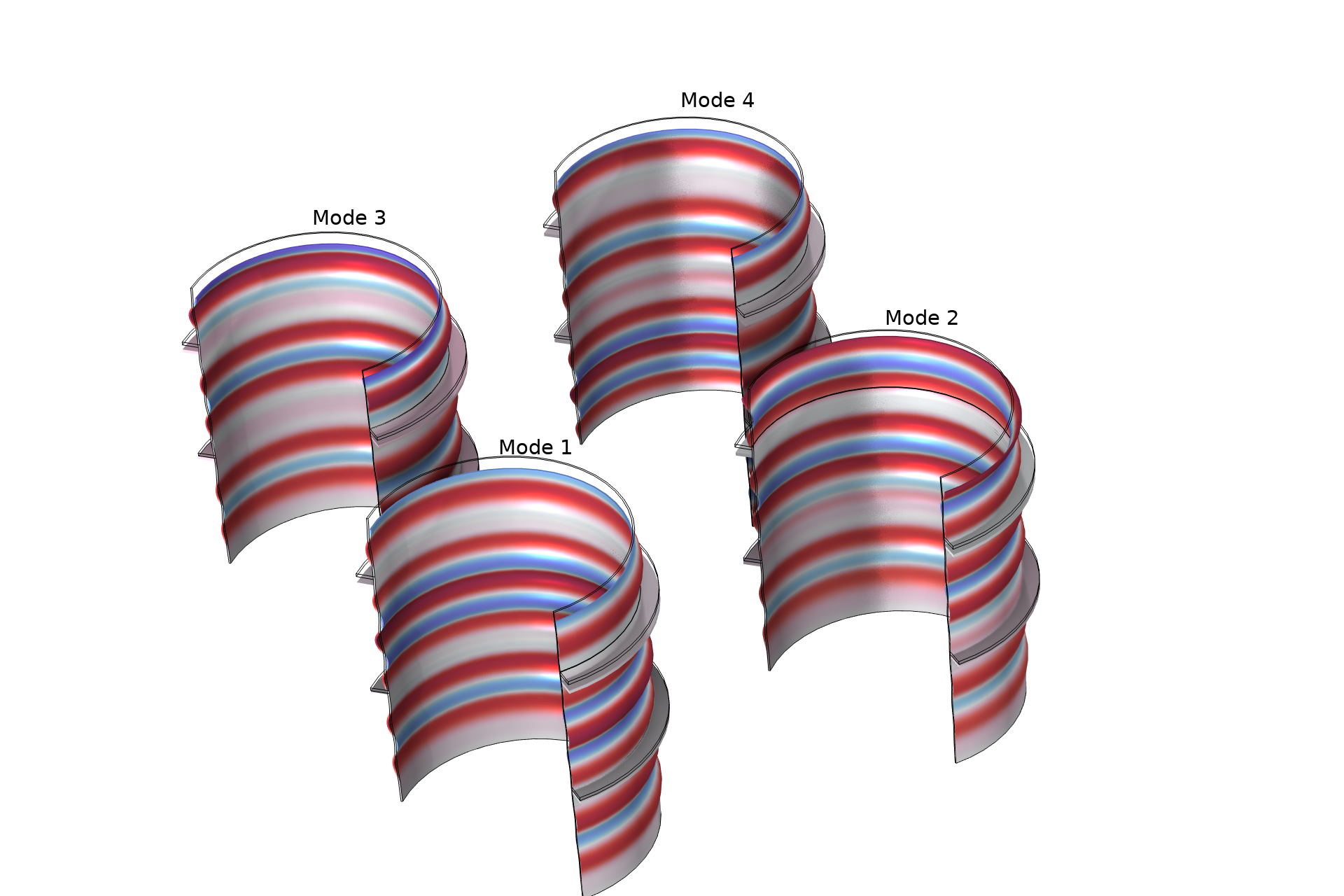
不同的缺陷在接近失效载荷时的变形(缩小了 5 倍)。颜色表示径向位移。
必须注意的是,不能完全假设轴对称壳的所有屈曲模式也是轴对称的。真正的第一屈曲模式不是轴对称的,看起来像这样:
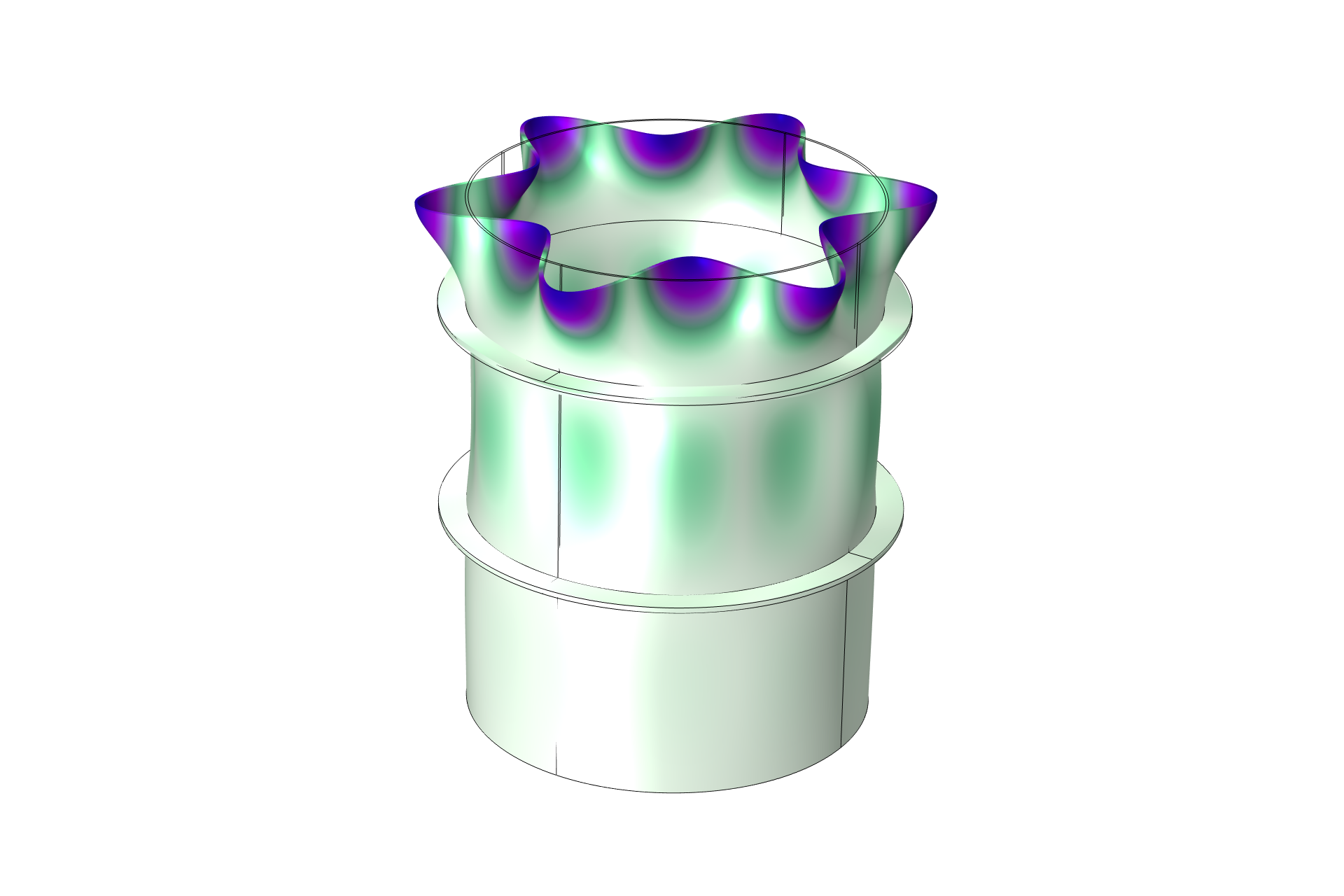
使用完整的三维公式时的第一种屈曲模式。
活荷载和静荷载的组合
线性屈曲分析中的载荷因子可以被认为是相对于所施加载荷的一种安全系数。有时,只有某一组载荷可以变化,其他载荷具有明确定义的值,比如自重就是一个典型的例子。如果假设结构不会仅因重力而失效,那么需要回答的问题是:如果考虑部分承载能力已经被自重利用,服役载荷的安全因子是多少?
本文中将不变的荷载称为静荷载,会发生变化的载荷称为活荷载。 COMSOL Multiphysics 6.1 版本新增了分析活载荷与静荷载共同作用的功能。
需要注意的是,不可能首先计算静载荷利用了多少承载能力,然后相应地减少允许的活载荷。假设有两个独立的荷载,P_1和P_2,并且对于每个荷载都有一个单独的屈曲临界值P_{1}_\text{c}和P_{2}_\text{c}。如果施加的载荷\alpha P_1_\text{c} + \beta P_2_\text{c}是这两个载荷的线性组合,那么当\alpha + \beta = 1时,临界状态通常不会发生。
在仅具有活荷载的普通线性屈曲分析中,我们需要有任意活荷载水平的静荷载工况,通过特征值分析计算临界荷载因子和相应的振型。这非常简单,当添加线性屈曲研究时,研究序列就会生成。如果要进行也包括静载荷的类似分析,需要两个稳态的研究步骤 — 从这些步骤中得出的结果需要由特征值求解器以不同的方式加以考虑。这样的研究可以通过不同的方式建立。接下来,您将看到我们建议的工作流程的步骤。
设置一个包含静载荷研究的 7 个步骤
第 1 步:添加研究
正常添加线性屈曲研究。
步骤 2:定义活荷载
像往常一样,用一个任意的荷载水平创建活荷载。
步骤 3:定义静载荷
使用载荷的实际值创建静载荷。最好同时选中载荷特征的线性屈曲部分中的视为静载复选框。严格来说,只有当一个载荷是随动型的时候才需要这样做(取决于变形)。如果要在载荷特征中显示线性屈曲部分,请确保选中显示更多选项下的高级物理场选项。
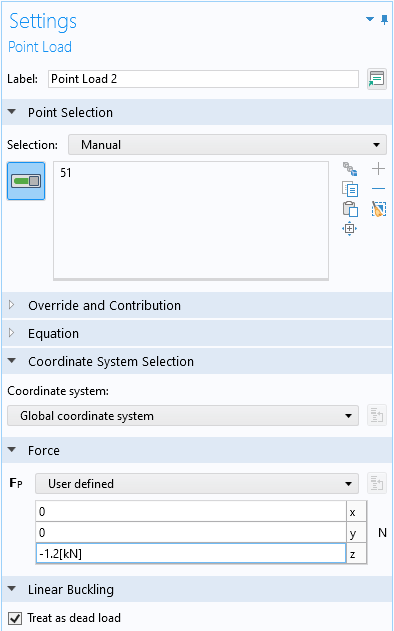
添加一个静载荷。
第 4 步:添加额外的研究步骤
在线性屈曲步骤之前再插入一个稳态研究步骤。
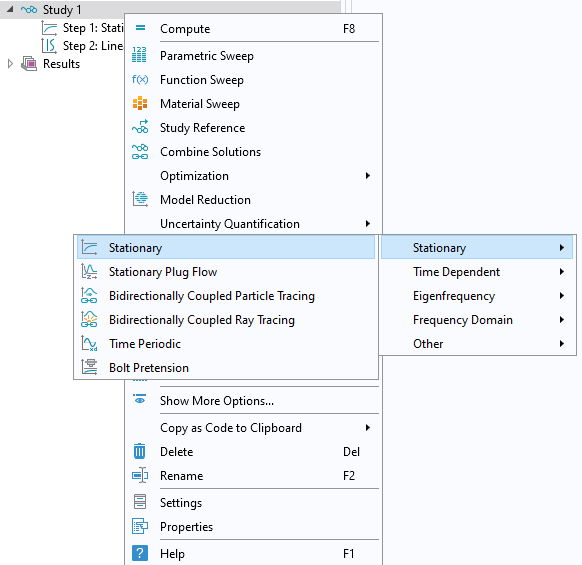
添加第二个稳态研究步骤。
第 5 步:在研究步骤中停用活荷载
在两个稳态研究步骤中的其中一个步骤中,我们需要同时分析两个载荷的影响。这与模型树的设置一样。
在另一个步骤中,应该只分析静载荷。这意味着我们必须禁用描述活载荷的所有载荷特征,进行这项任务最方便的是使用修改研究步骤的模型配置选项。
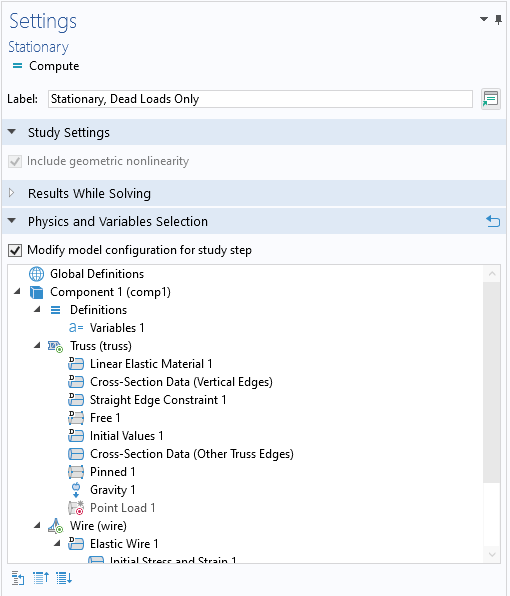
图中载荷1已被禁用。
步骤 6:选择两个稳态解进行屈曲分析
在线性屈曲研究步骤设置中,需要指定两个解。为此,首先需要为研究运行显示默认求解器。线性点是仅具有静载荷的研究,活荷载的解包含活荷载和静荷载的总和。
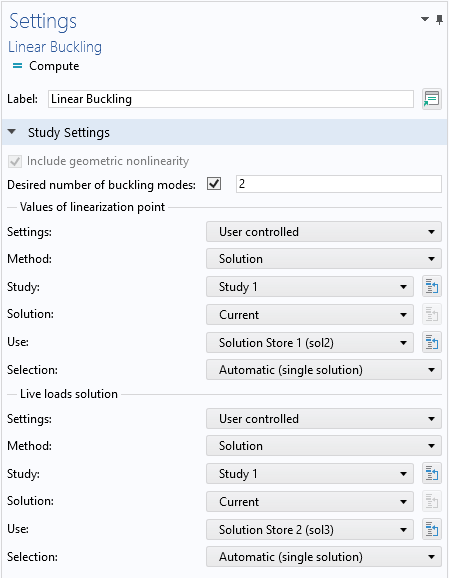
选择两个解。
第 7 步:运行全部研究
您可能想知道为什么两组载荷的静态解不是单独计算的。这是因为如果静态解是非线性的,那么给定的方法在静荷载解给出的应力状态下为屈曲分析提供了一个更加精确的线性点。
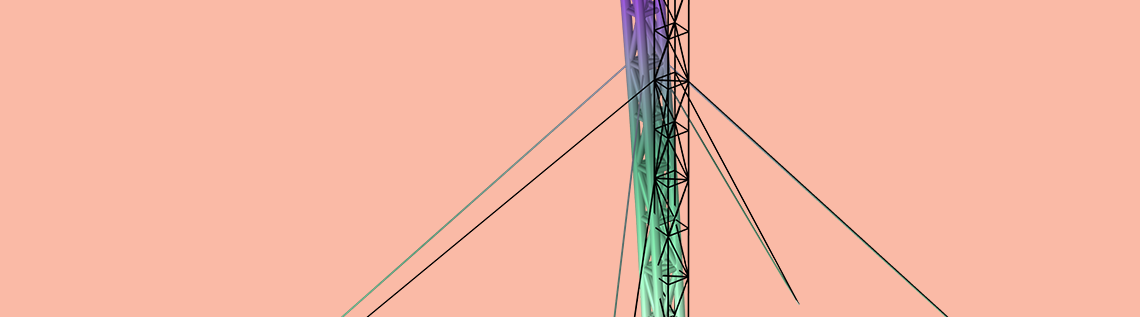
有关这类分析的示例,请查看静载作用下的桁架塔线性屈曲分析模型以及相关的应用程序文件。您可以在下文中找到这个模型和相关设置:

第一种屈曲模式。
在这个示例中,有两个效应会影响静载荷。除了自重外,支撑线中还有一个预紧力,会在塔的下部引起压应力。
结束语
最新版本的 COMSOL Multiphysics 能够建立高级屈曲研究,并且操作简单。单击下面的链接,进入 COMSOL 案例下载页面,尝试自己模拟文中讨论的模型:

评论 (0)