搜索结果

如何计算质量守恒和能量守恒
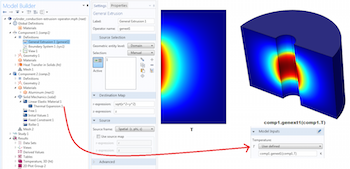
拟有没有想过如何计算流体流动仿真的质量守恒,或共轭传热模拟的能量平衡?如果是,请继续阅读 >>
第 2 部分:用广义拉伸算子映射变量
在上一篇博客中,我们介绍了线性拉伸算子并演示了如何使用它们在源和目标之间映射变量。如前面所讲的,这种方法仅限于通过仿射变换将源和目标相关联的情况。今天,我们将讨论广义拉伸算子,旨在处理非线性映射和不同维度的几何实体之间的变量映射。 拉伸算子简要回顾 在目标实体中的一点处 Pd,我们希望计算一个量,该量是在源实体中定义的另一个量的函数。因此,来自源点 Ps 的量需要被复制到目标实体。拉伸算子用于识别源实体中的哪一点与目标实体中的某点相对应。换句话说,算子定义了点到点映射。 \textbf{T}:Pd \rightarrow Ps. 如果映射是仿射,知道源中的一些点如何对应于目标实体中的点就足够了。从这样的源-目标对中,可以从叠加推断出一般的映射。然而,一般来说,我们需要为映射编写数学表达式。这个表达式可以是源点 Ps 作为 Pd 的函数的显式定义,或者是 Pd 和 Ps 之间的隐式关系。 在 COMSOL Multiphysics 中使用广义拉伸算子 当使用 线性拉伸算子 时,我们直观地指出了足够多的点(基)的映射,COMSOL Multiphysics 计算出了如何转换剩余的点。使用广义拉伸算子 时,我们写出了目标域中任意点映射的数学描述。 首先,我们来重点讨论如何使用广义拉伸算子复制线性拉伸算子。然后,我们可以考虑必须使用一般拉伸算子的示例。 对于仿射关系,广义拉伸算子可以用作线性拉伸算子的替代。当涉及到一般的非线性映射时,广义拉伸算子是必要的。要添加广义拉伸算子,请点击 定义 > 非局部耦合 > 广义拉伸算子。 示例1 在关于线性拉伸算子的博客文章中,我们考虑了一个放射,它将源域中的点 1、4 和 2 与目标域中的点 1、5 和 3 配对。请看下面的图,几何图形中的两个圆的圆心在原点,半径分别为 1.0 和 1.5。 任何仿射变换都可以表示为线性变换和平移运算的和。因此,我们有 xs = axd + byd + e, \qquad ys = cxd + dyd + f. 现在我们需要找到常数 a,b,c,d,e, 和 f。由于源点(0,0),(1.0, 0)和(0,1.0) 分别对应于目标点(0,0) ,(1.5, 0)和(0,1.5),我们得到 xs = \frac{2}{3}xd, ys = \frac{2}{3}yd. […]

使用 COMSOL Multiphysics® 模拟磁悬浮轴承
磁悬浮轴承广泛用在各种工业应用中,比如发电、石油提炼、涡轮机械、泵机和飞轮储能系统。和机械轴承不同的是,这类轴承是利用磁悬浮而非物理接触来支承移动载荷的。由于磁悬浮轴承运行时不产生摩擦且无需润滑,维护费用也低,因此正逐渐取代机械轴承,更何况这种轴承的使用寿命还更长。现在我们一起来了解如何使用 COMSOL Multiphysics® 软件计算磁力、扭矩和磁刚度等设计参数。
求解电磁波问题的仿真工具
使用 RF 模块或“波动光学”模块求解电磁波问题时,我们利用的是有限元方法求解 Maxwell 控制方程。本篇博客文章将针对建模、网格剖分、求解和后处理这几个步骤介绍几种方法及其适用范围。
如何建立吸湿膨胀模型
从木材建筑和纸张到电子和食品加工,吸湿膨胀发生在各个工业领域。了解如何在COMSOL Multiphysics®中为这种现象建模。

使用直接流固耦合方法计算声辐射力
本文是上一篇博客的后续报道,我们展示了在 COMSOL Multiphysics® 中计算声辐射力的一种直接的流体-结构相互作用的方法。
如何模拟三维旋转机械
电动机械是现代工业社会的重要支柱。在这类种类繁多的机械设备中,发电机或电动机一类的旋转机械应用最为广泛。COMSOL Multiphysics 中的旋转机械,磁物理场接口即旨在模拟这些系统。请跟随我们一起探讨旋转机械的模拟过程,并了解使用此功能详细的最佳做法。

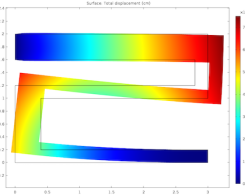
通过变形实现物理运动的图形化显示
在许多仿真应用中,比如声波、振动机械硬件或管道中的流体,您都会希望能对器件内的运动或变形进行图形化显示。后处理和图形化显示能帮您加深对仿真结果的理解,通过绘图来显示物理运动也能使您综合考虑器件中的每个方面。变形是帮助实现这一点的绝佳方式。