
许多水下汽车都会采用高功耗的主动传感方法来探测和识别周围海洋环境中的物体。印度 PSG 技术学院的研究团队在盲眼洞穴鱼的启发下设计了一款压力传感器,并借助数值仿真分析了此设计,希望做出一个节能型的替代方案。在本篇博客中,我们将近距离分析该款被动型 MEMS 压力传感器。
压力传感器的本质
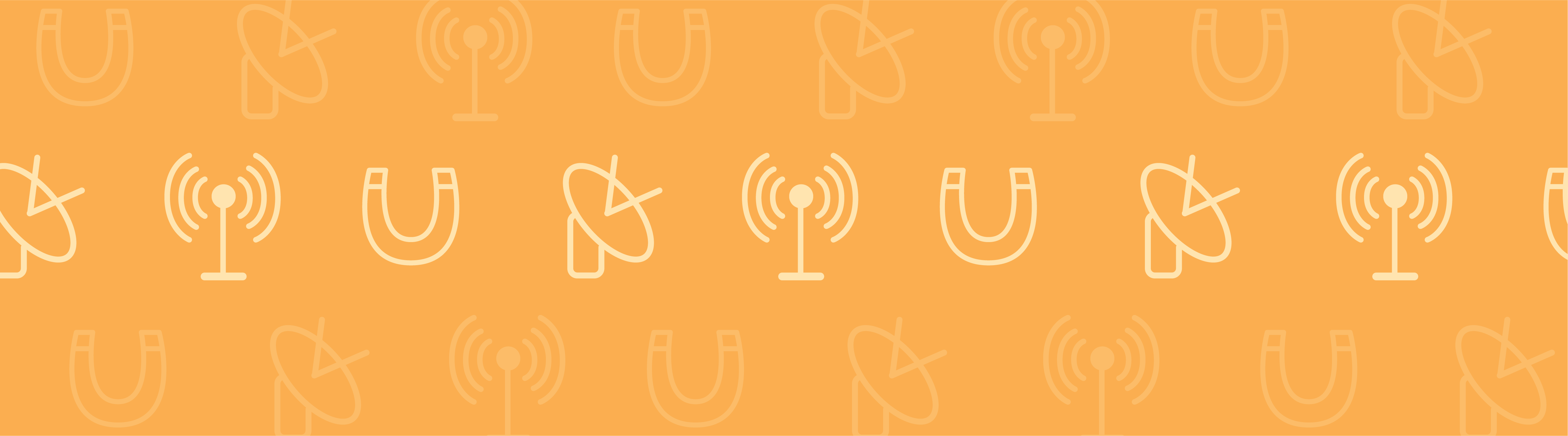
水下环境绝非人造车辆的理想驾驶环境,由于缺乏光照再加上水体浑浊,水下的能见度极差,有时甚至完全无法视物;所以类似潜艇等水下车辆就需要通过探测和监控来避开水下环境中的各类物体。如果您觉得这样难度还不算高的话,那不妨再想一下潜艇的能源情况,它的能源供应有限,所以需要尽量减少能耗。
无人驾驶潜艇的照片。(图片由 CSIRO ICT 中心提供,已获Creative Commons Attribution 3.0 Unported授权,并通过Wikimedia Commons分享。)
常规潜艇一般会采用声呐和光学方法进行水下导航。这些方法的效果不错,但存在一些问题。声呐可能伤害甚至杀死一些海洋生物,而光学方法在低能见度下的表现一般。此外,这两种方法都会进行主动感应,效率较低,但能耗很高。
在为水下车辆寻找更高效的环境监测方法时,印度 PSG 技术学院(位于印度泰米尔纳德邦,哥印拜陀市)从盲眼洞穴鱼的身上得到了启发。
墨西哥盲眼洞穴鱼身上有许多我们称作侧线的神经丘,因此能有效在黑暗混乱的水域中避开障碍,而且游动速度很快。具体来说,这类鱼能通过表层神经丘感应流动变化,并能通过管器神经丘感应压力变化,借以实现在周围环境中的导航。
盲眼洞穴鱼的图片,用阴影表示侧线。侧线中的点表示管器神经丘。图片由 Aarthi E. 等人制作,取自他们在 COMSOL 用户年会 2013 班加罗尔站提交的论文。
洞穴鱼最重要的特点也许是它能通过被动感应探查周围环境;也就是说,它无需消耗能量发出声波就能实现在周围环境中的导航,避免了因为发出声波可能造成的伤害或因此暴露位置的风险。所以说,洞穴鱼可以被动检测周围的水流。
研究人员据此开发了一款节能型被动感应方法,并使用 COMSOL Multiphysics 的层流接口来预测这款水下压力传感器的性能。
开发被动型水下压力传感器
为了开发出一款能够有效实现被动工作的压力传感器,研究人员模拟了洞穴鱼的侧线。
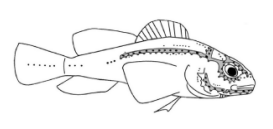
设计压力传感器时,他们参照洞穴鱼在一个阵列中安装了 10 个传感器,传感器之间留有一定的间隔以避免串扰。设计中还包括一个安装在传感器底座上的柔性感应膜片。感应层由液晶高分子 (LCP) 制作,这是一种很坚韧的柔性材料,抗腐蚀能力很好。
感应膜片的上方是应变仪,用于将压力变化转换为金制压阻器中的电阻变化。最后,使用一个立式结构来模拟鱼的体表神经丘并测量速度。
MEMS 压力传感器的几何。图片由 Aarthi E. 等人制作,取自他们在 COMSOL 用户年会 2013 班加罗尔站提交的论文。
压力传感器可以探测周围水体中的扰动。例如,假设安装了该传感器的潜艇正接近一艘沉船。沉船造成了水流的变化,因此会在传感器的膜片中产生一个压力差。因为压力差会使膜片发生弯曲,所以传感器能够识别出这个变化,如下图所示。
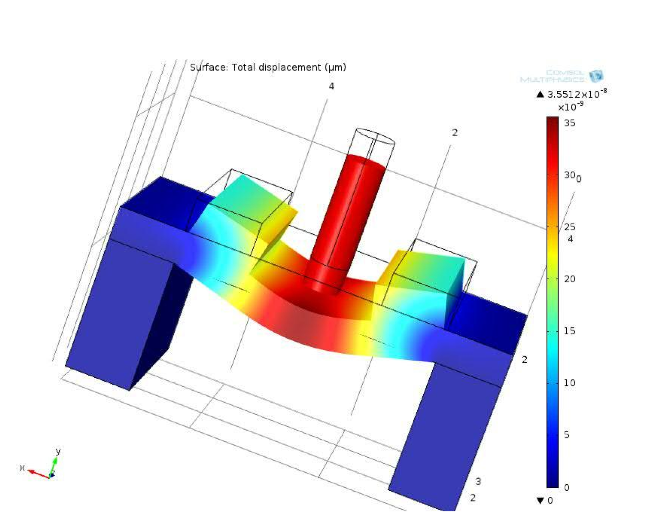
施加压力后产生的膜片位移。图片由 Aarthi E. 等人制作,取自他们在 COMSOL 用户年会 2013 班加罗尔站提交的论文。
弯曲会造成压阻器电阻值的变化,可以作为电压漂移读取。这样,压力传感器将能被动地检测环境的改变,比如由于沉船造成的变化。
传感器使潜艇能够轻松在周边环境中进行导航,而且不会浪费太多能量。不过,研究人员首先应确认该压力传感器的工作性能。
借助仿真检查压力传感器的设计
研究人员计算了作用在传感器上的各级边界应力的速度及压力分布,借以分析压力传感器对周围环境变化的检测性能。在他们的仿真中,当有物体接近传感器时,边界应力会增加。边界应力的变化还会造成传感器所经历的速度及压力发生变化。
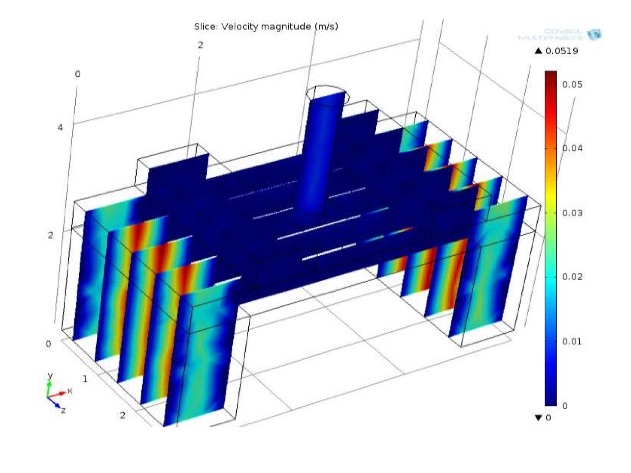
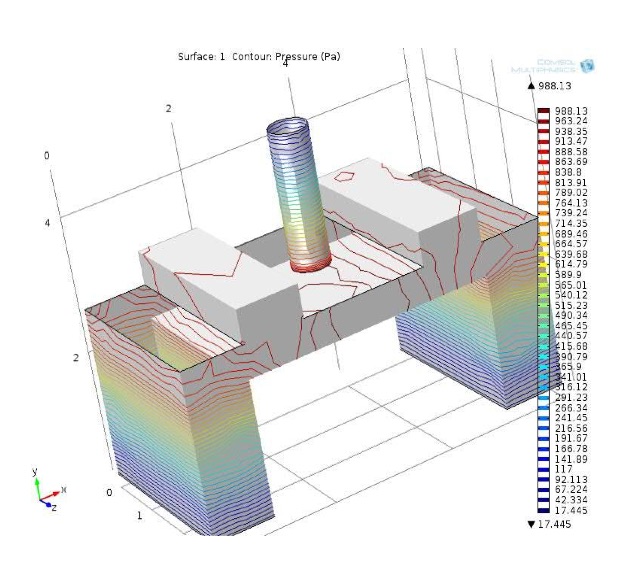
左:传感器上的速度分布。右:传感器上的压力分布。图片由 Aarthi E. 等人制作,取自他们在 COMSOL 用户年会 2013 班加罗尔站提交的论文。
仿真表明当边界应力增加时,传感器将经历速度及压力的变化,这也是盲眼洞穴鱼检测到的变化,那么压力传感器对此类变化的敏感度如何呢?
研究人员将灵敏度定义为每单位应力变化所对应的应变仪内的电阻变化。他们观察到电阻在压力变化时增大了,从而确定传感器足够灵敏可检测到小至 5 N/m2的压力变化。
整体而言,被动压力传感器不仅具备可正常工作的灵敏度,还兼具节能、安全与隐蔽等优点。在水下压力感应类应用中,这款设计是一个非常不错的节能型替代方案。借助 COMSOL 软件中的流固耦合特征、压敏电阻物理场接口和超弹性材料模型,我们能够轻松地模拟此类传感器。
下载研究
- 阅读 COMSOL 用户年会 2013 班加罗尔站收到的相关论文、海报及摘要:”针对水下应用开发 MEMS 压力传感器“

评论 (0)