
多数微流系统的调控都依靠无阀泵进行,因为无阀泵与生物材料相容性良好,并且堵塞风险较低。然而,这种类型的泵不适合黏性流体及小尺度或低流量的系统。为了突破这一局限,可以引入微型泵机理,将振荡流体运动转换为单向净流。
什么是无阀微泵?
小型设备具有非常多的应用领域,同时研究人员还在不断为它们寻找新的用途。我们之前在博客文章中介绍过其中一种用途:微流装置,这种装置可以让患者自行进行免疫检测测试。在微尺度的工作环境中,像这种设备的运转需要依靠更小的组件,如微型泵。
让我们来看一个Veryst 工程有限公司通过 COMSOL Multiphysics® 软件创建的教学模型:无阀微泵机理仿真模型。
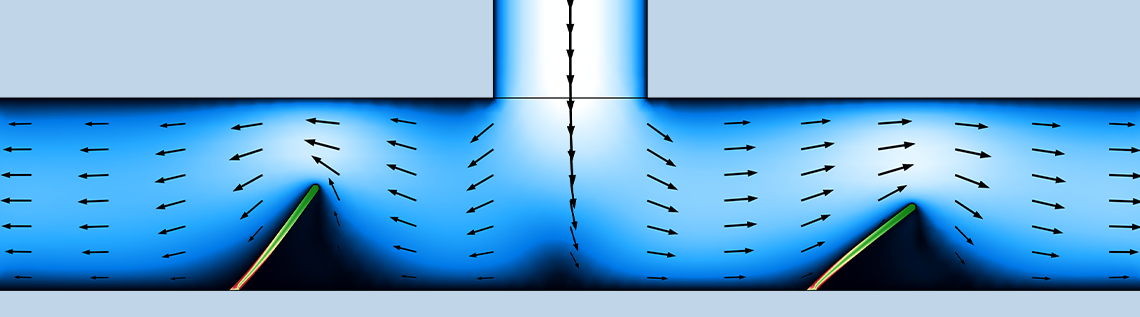
教学模型中的微泵通过循环的上下运动提供了振荡的流体流动。水平流道包含两个位于微泵两侧的倾斜微型襟翼,流体进入流道后,微型襟翼会根据流体运动被动地弯曲,以此使流体成为沿某一方向运动的净流。通过这个过程,微泵机理能够在无需阀门帮助的情况下创造流体流动。
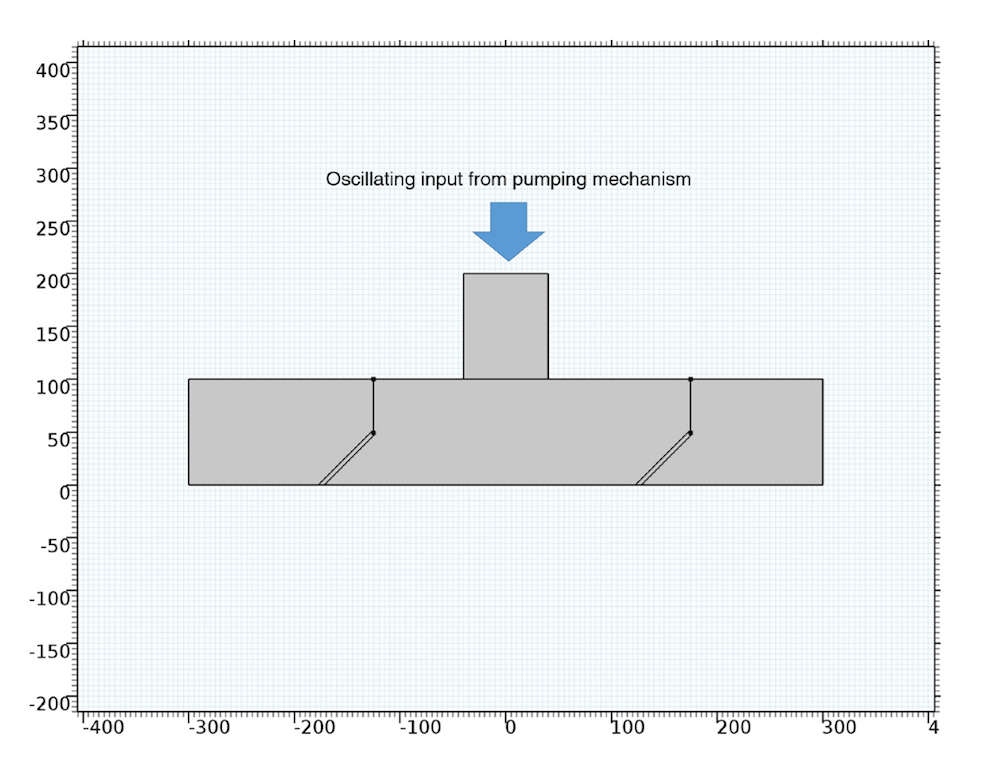
微泵机理教学模型的几何图形。
请注意,微型襟翼上面的直线对网格剖分算法有帮助。如果您想要学习如何创建这种模型,请查阅教学模型文件。
通过仿真评估微泵性能
此教学模型在一个 2 秒的时间周期内对微泵机理的净流率进行计算,2 秒的时间可以完成两个完整的泵循环。将这个仿真的 Reynolds 数设置为 16,这样我们就可以评估无阀微泵机理在低 Reynolds 数时的性能。COMSOL Multiphysics 的流-固耦合接口可以将襟翼对整体流动的影响纳入考虑范畴,并使建模更加容易。
{color:#00875A}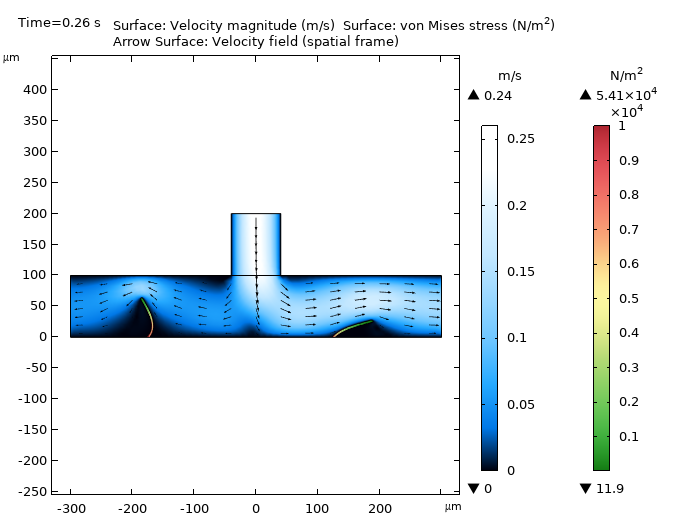
0.26 秒时,流体被推下,其中大部分流到了右边的出口。
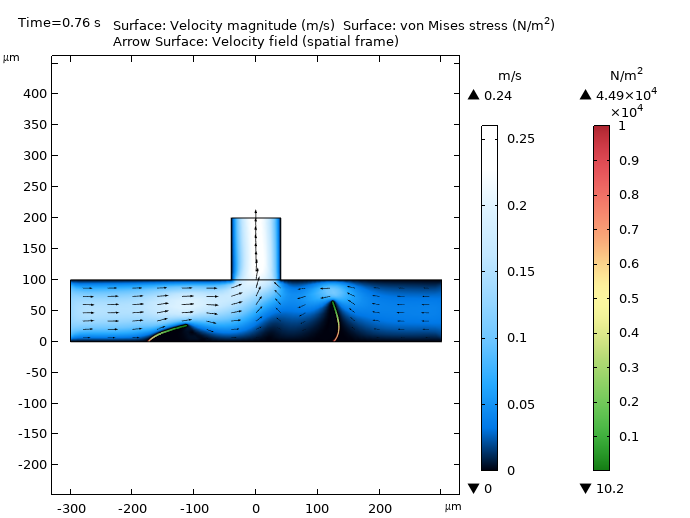
0.76 秒时,流体被抽起,其中大部分是从左边入口流入。
仿真从微泵中的流体向下流动开始,也就是微泵将流体推下至水平流道。此操作会导致右边的微型襟翼向下弯曲,同时左边的襟翼向上弯曲。在这个位置,左侧微型襟翼阻碍流体流到左边,并且此时右边的流道扩大。这自然会导致绝大部分的流体流动到右边,因为此路径的阻力最小。
在向上抽吸的过程中,流体被泵入垂直流道。在这一过程中,流体导致微型襟翼的弯曲方向与上一种情况相反。这种转变并不改变净流方向,因为现在绝大部分流体从左边的入口流入流道中。
微型襟翼由流体流动引起的自然变形,使这两个阶段都产生了从左到右的净流率。但是微泵机理是如何在整个仿真时间周期内维持这种单向流动的呢?
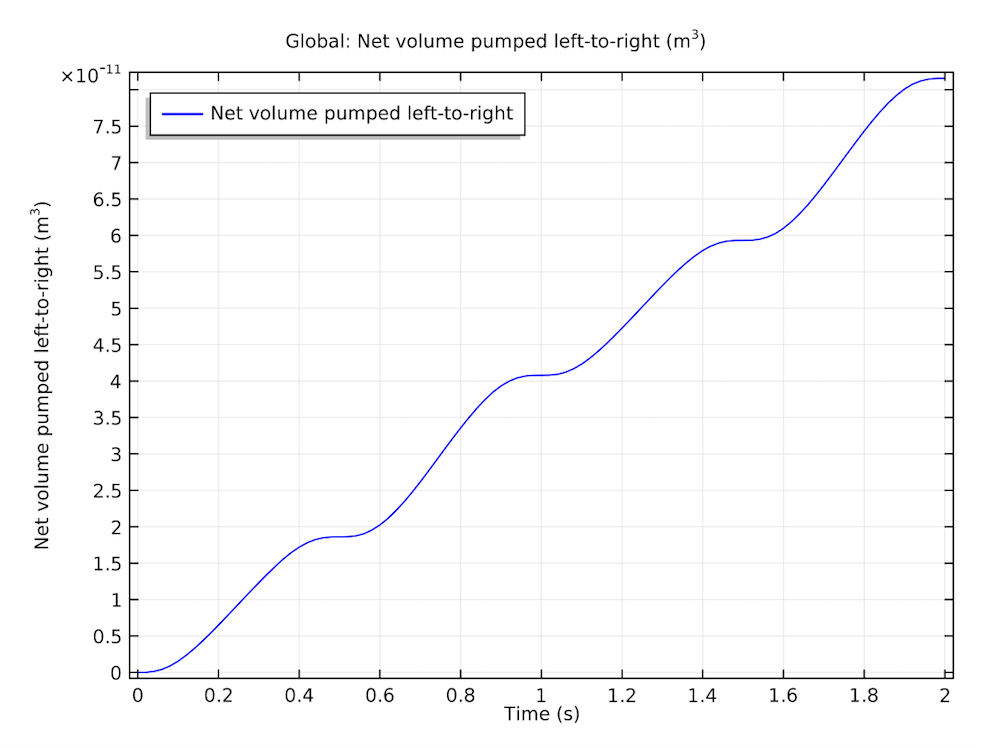
从左到右泵取的净流体的体积。
在 2 秒的测试期内,从左到右泵取的净流体体积是不断增加,并且在速度峰值时具有较高的净流率。这种无阀微泵机理可以在 Reynolds 数更低的情况下工作。
无阀微泵机理可以在许多的未来应用中发挥作用,其中之一就是作为流体的输送系统。在这种使用情景下,微泵机理可以从其左边的液滴贮槽采取流体,并通过微流体流道将其运送至右边的出口。在这篇博客文章中,我们只展示了一组仿真结果。通过由 Veryst 工程公司创建的教学模型,您可以对无阀微泵在不同的条件下工作情况进行可视化操作,并通过这些信息来发现微泵机理新用途。
编者注:本博客于 2023 年 8 月 25 日更新,加入了新版本制作的模型图像。上一版本的博客介绍了使用的是 COMSOL Multiphysics 5.1 版本制作的模型图像。

评论 (0)