柔性钳的形状和拓扑优化
Application ID: 89361
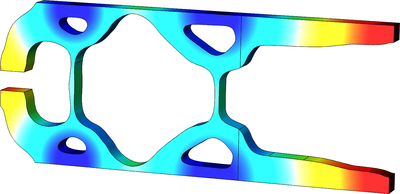
柔性机构由于不需铰链而具有简单性,因此非常有吸引力。在这个模型中,我们介绍如何使用拓扑优化设计一套柔性钳。使用形状优化对最终设计进行后处理,其中使用应力聚集函数来限制最大应力。最终设计在三维中得到了验证,并导出了 STL 文件。
案例中展示的此类问题通常可通过以下产品建模:
您可能需要以下相关模块才能创建并运行这个模型,包括:
建模所需的 COMSOL®产品组合取决于多种因素,包括边界条件、材料属性、物理场接口及零件库,等等。不同模块可能具有相同的特定功能,详情可以查阅技术规格表,推荐您通过免费的试用许可证来确定满足您的建模需求的正确产品组合。如有任何疑问,欢迎咨询COMSOL 销售和技术支持团队,我们会为您提供满意的答复。