COMSOL News
多物理场仿真杂志:IEEE 特刊
通过多物理场仿真开发微型机器人驱动技术
P. Lazarou, C. RotinatCEA LIST, France
微创手术机器人器械依赖于微型灵巧的工具及其可靠的驱动性。但大多数机器人手术器械都体积庞大,价格昂贵并且外科医生操作起来费时费力。法国原子能与可替代能源委员会(CEA LIST)的研究人员正在研究微型相变驱动器,它将会减轻外科医生在漫长手术过程中所承受的痛苦。Christine Rotinat 和 Panagiotis Lazarou 已经使用 COMSOL Multiphysics 软件模拟了微型相变驱动器,它可以提供高负荷及对病人和外科医生来说都安全的位移范围。他们的设计是基于 Goldschmidbӧing 等人的设计进行的,并依赖于导电石蜡复合体的体积膨胀的特性。他们用自己创建的耦合物理场仿真(其中包括非线性的导电率,不断变化的黏度,密度及特定的比热容)优化设计得到最佳的驱动和电力消耗。最终,他们的微型驱动器将会集成到供手术室内用机器人外科手术工具中。
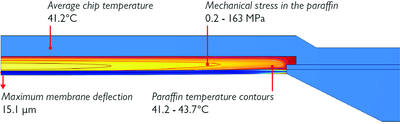 仿真结果显示了石蜡相变过程中微型驱动器的温度、应力和挠度。
仿真结果显示了石蜡相变过程中微型驱动器的温度、应力和挠度。
下载
- CEA_LIST_CN2014_CN.pdf- 1.97MB中文
- CEA_LIST_CN2014.pdf- 0.14MB