

今天,我们将介绍结构刚度的概念,并了解如何计算仅受机械载荷作用的线弹性结构的刚度。我们将重点探讨如何在不同的建模空间维度(0D 和 1D)中计算和解释它,以及哪些因素会影响结构的刚度。
什么是结构刚度?
当外力作用在一个弹性体上并试图使它变形时,弹性体会产生阻力抵抗外力。这种阻力被称为刚度。我们经常随口会把这个术语称作材料属性,而实际上,它可能是各种几何和材料参数的属性。在这篇博客中,我们将探讨这些材料属性。
在深入研究之前,我们需要从数学上定义刚度。假设有一个力 F0作用在物体上,使物体变形一个量 u0。如果给物体施加较小的力 ΔF,使其发生非常小的变形 Δu,那么这两个量的比值就是力在作用点的刚度,用状态变量 F0和 u0表示。
这就是线性刚度的定义,一般来说,它可以用在线性和非线性的力与位移曲线中。力-位移关系和线性刚度可以分别用以下方程进行数学表达:
{\Delta u}
=\left.\frac{\partial F}
{\partial u}
\right|_{F=F_0,u=u_0}
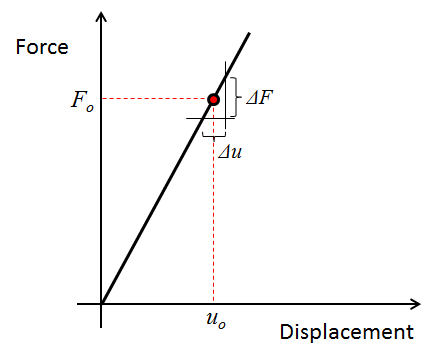
一个典型的线弹性结构的力与位移曲线。
一个实例问题
当对各种类型的结构系统进行建模时,分析的目标之一可能是计算出一个有效的刚度值,并根据计算方式来解释它的范围。一般来说,刚度可以是材料属性、材料方向、几何尺寸、加载方向、约束类型,以及施加了载荷和约束的空间域选择的函数。
为了便于说明问题,我们将使用长度 L=1m,宽度 b=0.2m,厚度 t=0.1m 的钢梁为例。该钢梁平行于 yz 平面且位于 x=0 的面是刚性固定的(即x、y和z方向的位移为零)。有一个均匀分布的力作用在与yz平面平行且位于 x=L 的面。梁的其他所有面是不受约束和无载荷的。因此,它们可以自由变形。
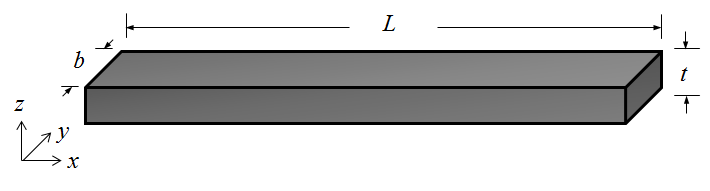
一根长为 L、宽为 b、厚为 t 的实心梁,边与直角坐标系的 x、y、z 方向对齐。
我们将通过解析法和使用 COMSOL Multiphysics 来计算该梁的刚度,并比较这两种方法得到的解。
探索建模空间维度
当开始对一个结构进行建模时,我们需要做出的一个关键选择是:决定我们真正感兴趣的细节有多少。换句话说,我们需要确定是否可以将整个结构作为空间中的一个点,或者是否需要在 1D、2D、甚至 3D 上求解它,来获得某些感兴趣的量的空间变化的更多细节。这意味着我们需要决定该结构可以被看作是一个单弹簧,还是一个分布在空间并相互连接的弹簧网络。
要做到这一点,我们应该尝试回答以下问题,可能还有其他几个问题,这取决于建模目标是什么:
- 材料属性是否存在空间不均匀性?
- 施加的力是否存在空间不均匀性?
- 结构的几何尺寸在某些方向上是不规则变化的吗?
- 是否有任何对称性的平面,让我们可以根据所建模的几何结构的对称性、施加的载荷和解的预期形态来确定?
- 是否存在我们感兴趣的,如孔或角周围的局部效应?
- 我们可以忽略某些方向上的应力或应变吗?
0D 模型中的刚度
我们首先查看梁的 0D 模型,在这个模型中,所有与加载、变形和材料响应有关的影响都被集总在空间的一个点上,整个梁被建模为单弹簧。
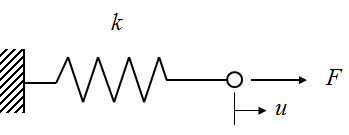
使用一个集总刚度 k,和一个作用在梁上并产生位移 u 的力 F,来表示 0D 的梁。在这种情况下,0D 模型也是梁的单自由度(SDOF)表示。
假设钢的行为遵循胡克定律(即应力与屈服强度以下的应变成比例),我们可以用材料的杨氏模量 E 写出应力-应变关系,即\sigma=E\epsilon。
使用一个简单的定义,其中应力等于单位横截面积的力,\sigma=F/A,A=bt,应变等于变形与原始长度的比值,\epsilon=u/L,结合这些,我们得到F=(EA/L)u。于是,我们得到力与位移的线性关系,使刚度与作用点以及力、位移和材料属性的任何空间变化无关。
因此,我们可以用以下公式来表达这个 0D 梁模型的轴向刚度:
假设钢的杨氏模量为 200GPa,梁的轴向刚度为 k=4×109N/m。
在 COMSOL Multiphysics 中,您可以使用全局常微分方程和微分代数方程接口(用于瞬态模拟)或简单地在零维模型中设置参数或变量来建立 0D 模型。
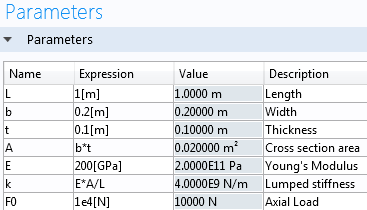
COMSOL 软件中的参数表的屏幕截图。
1D 模型中的刚度
在真实世界中,我们知道梁的一端是固定的,而另一端是受力的。因此,在沿长度方向的每个截面上的变形或位移(u)是不一样的。为了考虑这种影响,我们至少需要建立一个 1D 模型。
计算轴向刚度
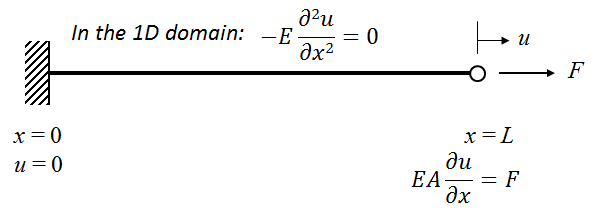
使用轴向力的静力平衡得到的梁的 1D 表示。
1D 模型要求我们在 1D 域上求解代表梁的轴向力平衡方程,以找出定义 1D 空间的x坐标与轴向位移(u)的函数。轴向力平衡方程(忽略任何弯曲或扭转力矩)可以写成:
两端的边界条件分别为:u=0,x=0,E\frac{du}{dx}=\frac{F}{A}(胡克定律),x=L。
结合上述等式,我们得到u(x)=\frac{Fx}{EA},其中 x 是距梁固定端的距离,u(x)是沿梁长度的位移。1D 模型表示无限多的弹簧相互串联在一起。这使我们能够得到关于梁的位移、应力和应变的空间变化的更详细的信息。它也可以理解为这些弹簧中的每一个都有自己的刚度。假设杨氏模量和横截面积不沿梁的长度方向变化,如果我们将梁离散成 n 个串联的弹簧,在我们的例子中,每个弹簧的刚度(ki)将是k_i=nEA/L。
然而,如果我们想把 1D 模型与 0D 模型联系起来,必须想象整个梁由一个弹簧近似。因此,1D 的等效刚度将是最大轴向位移与受力位置的轴向力之比。在这种情况下,u 在 x=L 处是最大的,其值为u_{max}=FL/EA。于是,我们得到 1D 梁的等效单弹簧刚度:
这表明,对于给定的建模参数,当在 x=L 处计算时,1D 模型的解(k=4×109N/m)接近 0D 模型的解。
计算弯曲刚度
转移到 1D 模型的另一个好处是,我们现在可以探索加载方向的影响。虽然我们将自己限制在 1D 空间内,但可以分别沿着“看不见的”y和z方向计算平面外的位移 v 和 w,当一个力沿着这些方向作用在梁上时。请注意,基于所选择的边界条件(一端固定一端自由的梁),位移分量 v 和 w 将作为x坐标的函数而变化。
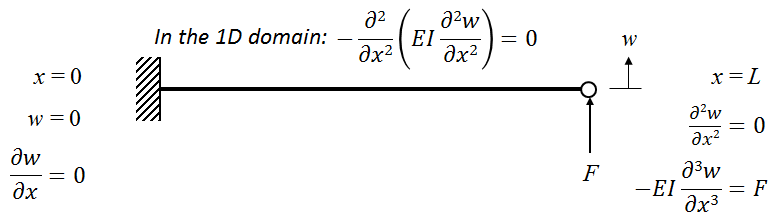
使用弯矩平衡获得的梁的 1D 表示。
研究这种情况也意味着我们必须引入额外的刚度项,将弯曲力与平面外位移相关联。这就要求我们在x=0w=0和\frac{dw}{dx}=0以及x=L,\frac{d^2w}{dx^2}=0和-EI\frac{d^3w}{dx^3}=F边界条件下,求解以下力矩平衡方程:
{dx^2}(EI\frac{d^2w}{dx^2})=0
在这些方程式中,我们将沿Z方向的位移(w)作为分析目标的代表。同样,将沿y方向的位移(v)作为分析目标的代表。假设变形比梁的尺寸小得多,这些表达式可以在物理上作如下解释。
平面外位移相对于X坐标的一阶导数代表斜率;二阶导数代表曲率;三阶导数与剪切力成正比。在这些方程中,I项表示第二面积惯性矩,是梁弯曲方向的一个函数。对于围绕y轴的弯曲(即沿Z方向作用的力),我们可以将其表示为:
对于围绕Z轴的弯曲(即沿 y 方向的作用力),我们可以表示为:
结合所有这些表达式,我们可以得到:
因此,1D 的等效弯曲刚度为最大平面外位移与受力位置的弯曲载荷之比。在这种情况下,当沿y和z方向施加力时,v 和 w 在 x=L 处都将是最大的。因此可以得到两个可能等效的 1D 梁的单弹簧弯曲刚度,具体取决于加载方向。
沿着Y方向的力和位移可以用刚度k_{yy}=\frac{Eb^3t}{4L^3}关联。沿着Z方向的力和位移可以用刚度k_{zz}=\frac{Ebt^3}{4L^3}关联。对于给定的建模参数,kyy= 4×107N/m,kzz= 1×107N/m。
在 COMSOL Multiphysics 中计算刚度
在 COMSOL Multiphysics 中,您可以先选择 2D 或 3D 空间维度,然后使用桁架或梁接口设置 1D 模型。
在这里,我们将向您展示如何在 3D 空间维度上使用梁接口计算轴向和弯曲刚度。1D 结构将被建模为欧拉-伯努利(Euler-Bernoulli)梁。COMSOL 软件也允许使用铁木辛柯(Timoshenko)梁理论,它更适用于对低长宽比的结构进行精确 1D 建模。
下面是通过 1D 模型获得刚度的工作流程:
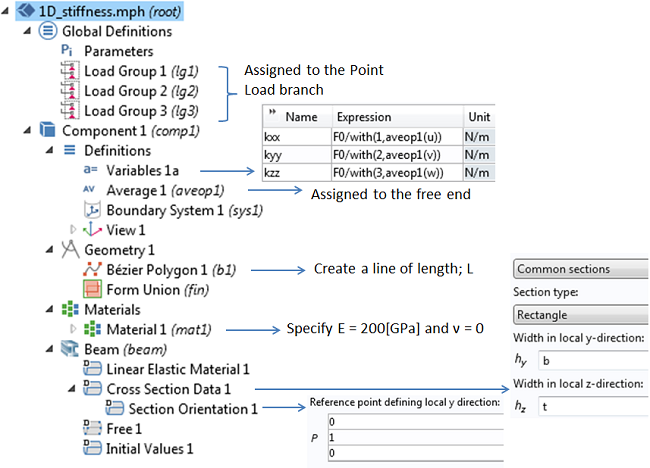
使用梁接口建立的 1D 模型的屏幕快照。变量被定义为计算轴向刚度(kxx)和弯曲刚度(kyy和 kzz)。平均耦合算子用于计算 x=L 点的位移。with()算子用于从模型求解的不同载荷工况下获取解。
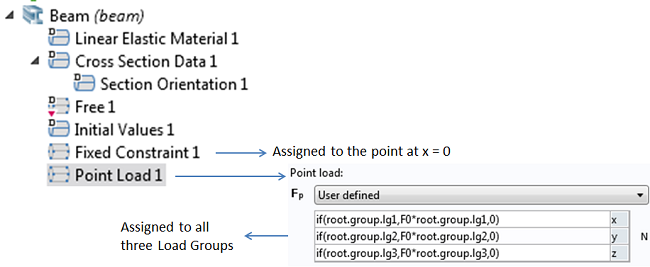
梁接口中使用的边界条件的屏幕快照。点载荷分量被施加给位于 x=L 的点。
在这个模型中,我们使用的力(点载荷)为 F0= 1×104N。只要不在模型中加入任何非线性效应,就可以使用任意大小的载荷。如果存在非线性,那么使用正确的线性化点很重要。这种情况将在以后的博客中讨论。
如图所示,你可以使用if()算子和与载荷组相关的名称(如root.group.lg1)创建一个 “开关”,这样当你在几个载荷下求解同一个模型时,一次只能使力矢量的一个分量不为零。
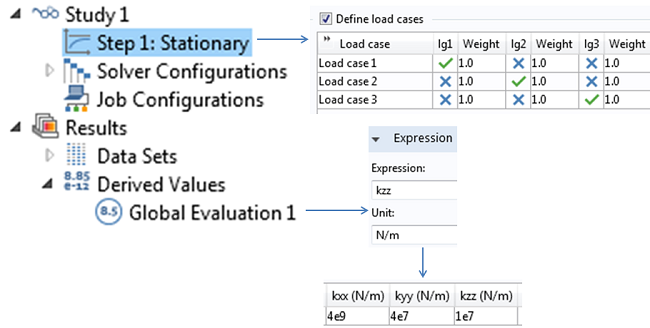
研究设置的屏幕快照,说明载荷是如何设置的,以便一次只激活力矢量的一个分量。全局计算用于输出 kxx,kyy,和 kzz的值。COMSOL 软件的解与解析解完全匹配。
只要我们不期望拉伸和弯曲之间有任何耦合(即,当刚度矩阵是对角线时),这里显示的用于计算刚度组件的方法就适合。我们将在本博客系列的第 2 部分介绍一种更普遍的计算方法。
接下来,我们可以用铁木辛柯梁理论来求解同一模型。与我们的预期一致,模拟产生了与轴向刚度完全相同的结果(kxx= 4×109N/m),但横向刚度将小于我们基于欧拉-伯努利理论得到的结果。在使用铁木辛柯梁理论时,考虑到的剪切变形将通过剪切模量对泊松比有轻微的依赖性,所以我们也需要将其纳入材料数据中。
| 泊松比 | kxx[N/m] | kyy[N/m] | kzz[N/m] |
|---|---|---|---|
| ν = 0 | 4×109 | 3.91×107 | 9.94×106 |
| ν = 0.3 | 4×109 | 3.88×107 | 9.92×106 |
结束语
在这篇博客中,我们介绍了使用解析法和 COMSOL 计算 0D 和 1D 线弹性结构刚度的方法。接下来的一篇博客,我们将讨论 2D 和 3D 情况。
编者注:我们在 2014 年 4 月 4 日发表了这个主题的后续博文。阅读本博客系列的第 2 部分,了解如何计算 2D 和 3D 的线弹性结构的刚度。

评论 (0)