
除了绕组类型(集中式或分布式)以外,电机设计背后的逻辑相对类似,因为它基于相量图。今天,我们将使用带有集中绕组的感应电机标准模型,向您展示如何在COMSOL Multiphysics软件中创建选择,简化绕组设计的分析。然后,我们将演示如何通过“App开发器”自动执行这些过程,进一步推进您的仿真研究。
感应电机示例模型
电机的运行模式和类型由其绕组的连接方式决定。它们的基本工作原理基于流经这些绕组的电压和电流。无论什么类型的电机,绕组都可分为集中绕组和分布绕组,集中式绕组进一步还可以分为整数槽绕组与分数槽绕组。
顾名思义,集中绕组是指电机中的每个极都有一组导体穿过同一个槽。分布式绕组槽的数量大于极的数量,因此每个极的导体将分布在槽中。本文不讨论使用集中绕组和分布式绕组的好处及其区别。
本文讨论的感应电机模型是使用 60° 的磁极节距制造的。这意味着从一个定子槽的底部到另一个定子槽的底部有 60° 的间隔。为了创建一些均匀的磁通密度线,并确保钢转子上的感应产生运动,我们需要确保每个定子槽之间有一定的间隔。在许多转子拓扑中,这个间隙由定子齿填充。然而,在这个例子中,我们选择了 15° 气隙,这意味着每个定子槽将覆盖全部所需的 60° 间隔的 45°。
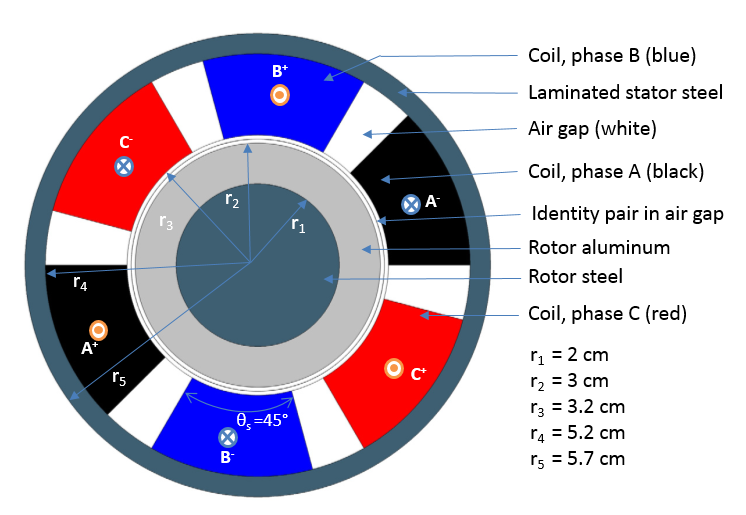
三相感应电机示意图,描述了原始模型的尺寸和相位配置。
在这一点上,我们所描述的可能听起来很复杂,但实际上很简单。正如我们前面提到的,电机绕组的设计取决于它们的电压相量图。在下图中,蓝线代表相位,而橙色线代表负相位。
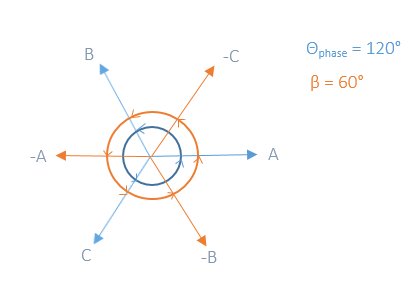
三相相量图。
本例中使用的感应电机是一台三相两极电机,可以用相量图准确描述,其中60°表示定子中的极距。唯一的挑战是,每个定子之间分离的机械角度仅适用于两极电机的情况。我们需要在相量图中显示的电角度(描述转子的圆周运动)和实际机械角度(描述每个定子槽的物理位置)之间建立一种关系。电角度由以下等式表示:
在 COMSOL Multiphysics®中创建选择
在定义节点下,我们可以创建选择,也就是说,将几何实体(例如域、边界、边和点)进行分组。对于两极电机,有两个关注点: 识别与每个相对应的定子槽和识别电流方向(向内或向外)。这里需要注意的是,虽然有多种方法可以执行相同的操作,本文中的方法用于演示如何在模型中使用选择。
在下图中,我们通过添加“球” 的选择实现参数化,这样我们就可以始终选择每个定子槽的中点。如前所述,线圈间距为 45°,由于我们使用的是圆形几何,因此很容易将x和y坐标参数化以跟踪几何形状周围每个线圈位置:
\cos\Big(\frac{\frac{\pi}{4}}{2}\Big)

在 COMSOL Multiphysics 中创建参数化的球选择。
如上面截图显示,球1代表相 –A,球2代表相A。通过并集特征,将这些单元合并到一个选择中。这使得我们可以很容易地从每个线圈特征的物理接口中调用它们。

链接线圈 1: 相A 到并集1 选择和反向电流方向到球 1 选择。
上面截图中突出显示的框显示了物理节点可以链接到域选择。这里,绿色方框代表并集节点,蓝色方框代表球 1。这种链接是必要的,以表明目前的电流方向是相反的。
相位的顺序将决定转子移动的方向。因此,我们将使用与原始示例相同的顺序,从相 A 开始。现在,我们来考虑一台四极电机,并描述电角度和机械角度以及电流的相位和方向。下表列出了这些单元的概述。
| 阶段 | -A | B | -C | A | -B | C | -A | B | -C | A | -B | C |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 当前方向 | ||||||||||||
| θelectrical | 0 | 60 | 120 | 180 | 240 | 300 | 360 | 420 | 480 | 540 | 600 | 660 |
| θmechanical | 0 | 30 | 60 | 90 | 120 | 150 | 180 | 210 | 240 | 270 | 300 | 330 |
四极电机的相位、电流方向、电角度和机械角度之间的关系。
如果手动完成,这项任务可能会变得相当乏味。为了执行相同的操作,我们需要创建12个球选择,将它们分组为三个并集,然后识别每个反向的电流方向。现在,假设我们需要对一台八极或十极电机这样操做,并且必须手动改变每种绕组设计的每种选择。那么,正如我们接下来将演示的,App 开发器在这种情况下就变得非常方便。
使用方法在 App 开发器中创建动态选择
使用 App 开发器,您可以开发定制的用户界面,来满足您的特定需求。在这里,我们已经参数化了我们的模型,以便创建一个依赖于定子极距和机械角度的函数,并可用于为多极感应三相电机建模。如前所述,有许多方法可以执行这样的操作,但是我们的目标是展示使用选择和 App 开发器的功能和优势。
在球选择中作为x和y位置输入的功能可以分别通过以下表达式来描述:
\cos\Big(\frac{\Theta_s}{2}+n\frac{\Theta_{mechanical}}{2}\Big)
\Big)
这里,θs是线圈节距,n是从零到模型中线圈总数的整数。
由于我们需要处理三个相位和两个电流方向,我们可以很容易地使用 mod 函数(%)来识别每个线圈的两个有趣属性:相位和电流方向。如果我们从 –A 相开始对线圈进行计数,直到每个线圈槽的所有机械角度都被覆盖,我们将得到与下表类似的四极情况。
| Phase | -A | B | -C | A | -B | C | -A | B | -C | A | -B | C |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Coil Number (i) | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| i%3 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | 1 | 2 | 0 | 1 | 2 |
| i%2 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
用于识别每个相位以及何时反转当前方向的算法的描述。
这里,线圈编号(i)为 0 表示相 –A,线圈编号 1 表示相 B,以此类推。使用 i%3,我们可以轻松地将相A 识别为 0,相B 识别为 1,相C 识别为 2。此外,对于从相 A 开始的每个相位,我们可以看到负电流被标识为 1,而电流的正极被标识为 0。
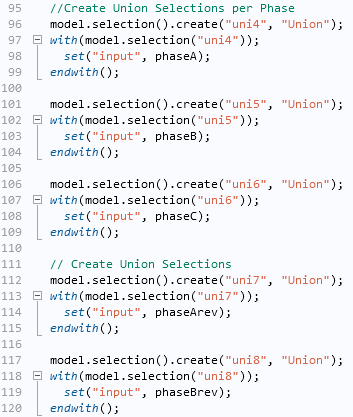
为了了解上表中描述的工作原理,让我们来看看在 App 开发器的方法编辑器中创建的一段代码。
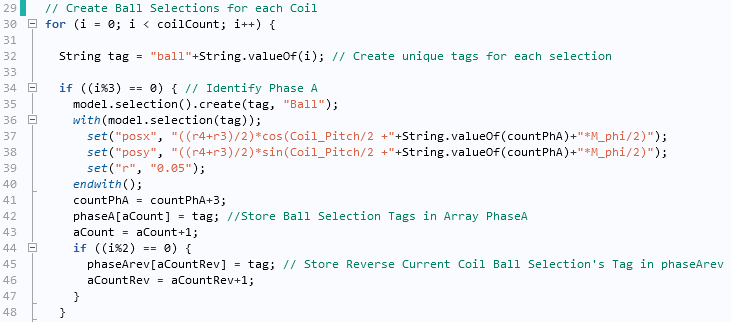
使用方法编辑器为每个线圈生成自动球选择。
上图仅显示了如何为相A创建选择。这里,我们使用三个计数器:i从0开始计数,直到最后一个线圈(四极情况下为 11)。如果 i%3 为真,那么我们可以说它是相A,并将把这些选择存储在相A数组中。然后我们需要检查当前方向。如果 i%2 为 0,那么电流的方向被认为是负的,我们将把这些选择存储在另一个名为phaseArev的数组中。
到目前为止,我们已经创建了球选择,但仍然需要创建并集。这个操作非常容易执行,因为在我们的情况下,我们将始终有6个联合:相A、相B 和相C,以及对应于反向电流方向的三个并集。
使用方法编辑器为每个相创建并集选择。
同样,我们需要确保每个并集都被分配到相应的物理接口。
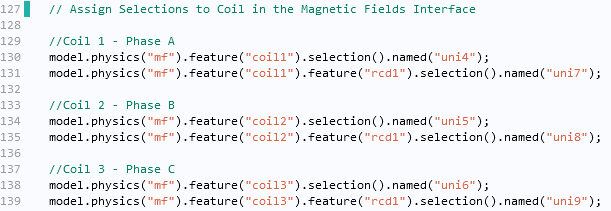
使用方法编辑器将线圈链接到并集选择,并将反向电流方向链接到球选择。
现在,我们已经完成了选择的创建,选择的数量由仿真 App 中用户输入的极点数量决定。如果能再多花点时间,您可以通过表单编辑器进一步扩展该仿真 App 的功能。利用这个工具,我们能够设计一个仿真 App,使用户能够做到,分配材料属性,解决方案的时间依赖性(瞬态或谐波),甚至自动后处理等更多的功能。下面的截图展示了这种仿真 APP。

基于原感应电机模型的仿真App。该仿真 App 根据电气和机械角度之间的关系创建和显示选择。
了解有关使用“App 开发器”进行选择和自动化流程的更多信息
- 阅读如何使用不同类型的选择简化您的仿真工作流程
- 找出如何使用 App 开发器自动进行模型预处理
- 下载相关仿真 App:电机绕组设计器

评论 (0)