

您可以使用集总机械系统 接口的集总元件,例如质量、弹簧和阻尼器开发一维机械电路模型。这种电路或集总模型可以很容易地与标准有限元模型相耦合,这在模拟复杂的机械系统时非常有用。
使用集总机械系统工作
一般来说,一个机械系统的所有组件基本上都可以被建模为集总质量、刚度和阻尼参数的组合。有限元法(FEM)使用类似的类比,将这些参数分布在网格单元上并将它们组合起来,形成每个组件的完整质量、刚度和阻尼矩阵。
当对大型复杂系统进行建模时,为了对系统有更好的理解,简化模型设置中的各种配置是有用的。例如,考虑由单向地面激励引起的车辆振动分析。使用简化的方法,可以使用弹簧-阻尼器系统来对汽车轮胎进行建模,忽略轮胎的非线性行为。同样地,如果想用集总方法模拟人体,可以使用集总机械系统 接口计算人体不同部位的响应。


集总方法的其他用途包括电声分析,即可以通过集总元件(如电阻器、电感器、电容器、质量、弹簧和阻尼器)对不同的物理场(电气、机械等)进行建模。
让我们讨论如何开发和解决用于各种类型系统的等效电路。
机械和电气类比
机械电路的理论源于电路的概念。只要建立了机械电路和电气电路之间的联系或类比,就可以使用用于纯电气系统的电路理论来分析机械系统。使用的方法如下:
- 在电气系统和机械系统之间建立类比
- 用电路理论求解电气系统
- 将解转化为机械量
开发这些类比是为了在机械和电气物理中使用的相同数学变量之间找到一种关系。许多类比在理论上是可行的,但有两个类比被广泛使用:阻抗和迁移率。
对于机械系统,阻抗是力和速度的比值,而迁移性是速度和力的比值(=1/阻抗)。阻抗类比将力与电压类比,而迁移性将速度与电流类比。这些类比在定义机电系统时非常有用,因为此类系统在电气和机械组件之间存在联系。
让我们更详细地讨论电气类比。考虑一个质量-弹簧-阻尼器系统,其中弹簧充当存储元件,相当于电路中的电容器。阻尼器充当耗散元件,相当于一个电阻。质量是一个惯性元件,相当于一个电感。这种与电气系统的类比通常被称为迁移率类比,其中从机械系统(通过施力)计算出的速度相当于从电气系统(通过施压)获得的电流。这些等效系统如下图所示。


左图:集总机械系统(阻抗类比)。右图:等效电路(迁移率类比)。
考虑一个由质量-弹簧-阻尼系统组成的扬声器驱动系统示例,其中隔膜和音圈形成质量、定心支片和环绕(如下面的扬声器驱动图所示)构成弹簧元件。悬架中的损耗可以建模为阻尼元件。这样一个系统(例如上面显示的集总电路和电路)的运动方程由下式给出:
式中, m=L,k=\frac{1}{C},c=R,F=V,v=i。
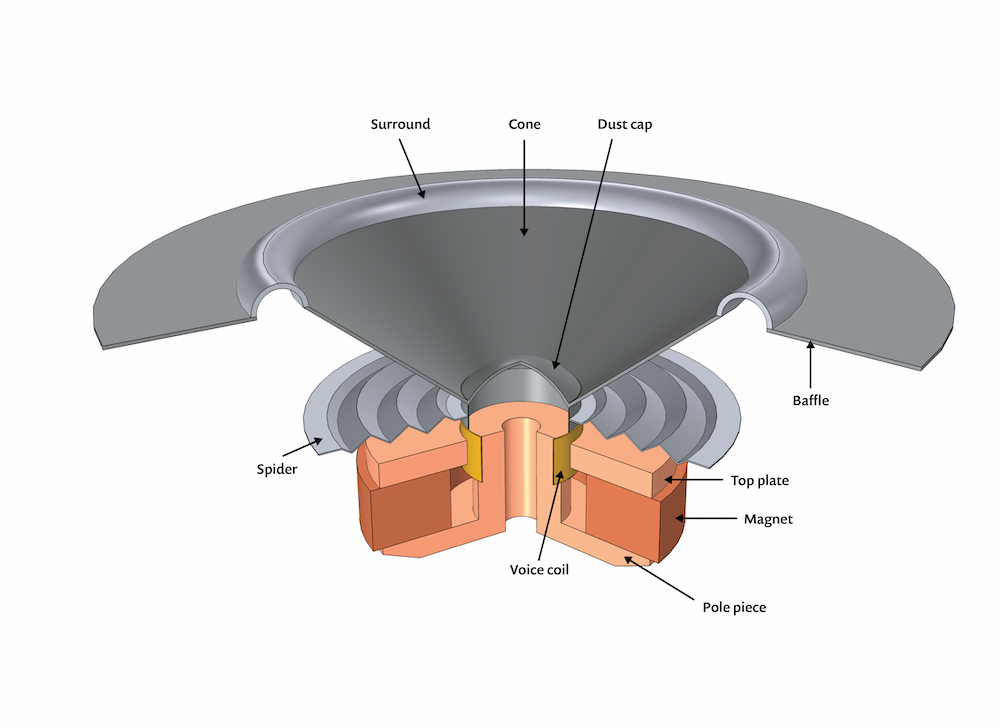
典型扬声器驱动器的示意图。
该方程产生机械阻抗(\frac{F} {v}) 模型为 LRC 串联电路,这表示 LRC 串联电路与机械电路并联是一样的。并联 LRC 电路类似于机械迁移率模型(当质量、弹簧和阻尼器串联排列时)。
COMSOL 案例库中的两个示例更详细地讨论了机械和电气类比:扬声器驱动器集总的教程模型和包含机械组件的相应教程。
集总建模的物理场接口
自 5.4 版本起,COMSOL Multiphysics® 软件提供的集总机械系统 接口包含了不同的集总组件(例如质量和弹簧),它们可以串联或并联排列,用于分析一维中的单个位移和力。可以通过将集总模型与支持二维和三维单元的多体模型耦合来克服一维建模的限制。
例如,考虑一个具有六个自由度(三个平移和三个旋转)的汽车模型,并假设来自地面的单向激励。这种激励可以使用集总方法进行建模,并与分布式模型相结合,用于考虑所有六个自由度的影响。可以使用固体力学 接口或多体动力学 接口来构建分布式模型。另一个例子是对结构的隔振进行建模,其中可以使用弹簧阻尼系统对隔振器进行建模,并将其连接到具有多个自由度的质量块上。
接下来,让我们讨论如何使用这种方法在 COMSOL Multiphysics 中开发机械电路模型。
机械电路模型的组成
我们从集总系统的示意图开始,标记每个组件(例如质量、弹簧和阻尼器)的端口。然后,应用激励,解决位移和力的问题。
机械电路中的组件分为双端口组件和单端口组件。考虑到双端口组件,位移和力将应用于组件(例如质量、弹簧、阻尼器和阻抗)。例如,质量上的位移是相同的,而在力方面存在差异。类似地,弹簧组件上的力是相同的,但在位移方面存在差异。双端口网络的广义方程(如下所示,其中 p_1 和 p_2 表示跨组件的端口)由下式给出:

式中,f_{p_1},f_{p_2} 和 u_{p_1},u_{p_2} 分别表示端口 p_1 和 p_2 的力和位移。
COMSOL Multiphysics 的集总机械系统 接口中可用的双端口组件如下表所示:
| 双端口组件 | 示意图 | f | u | f_p | u_p |
|---|---|---|---|---|---|
| 质量 |  |
m \ddot{u_p} | 0 | 0 | u_p |
| 弹簧 |  |
0 | u | -ku | 0 |
| 阻尼器 |  |
0 | u | -c \dot{u} | 0 |
| 阻抗 |  |
\begin{bmatrix}
f_{p_1}\\ f_{p_2} \end{bmatrix}=\begin{bmatrix} Z_{11} & Z_{12}\\ Z_{21} & Z_{22} \end{bmatrix} \begin{bmatrix} \dot u_{p_1}\\ \dot u_{p_2} \end{bmatrix} |
|||
| 位移源 |  |
0 | u | f | |
| 力源 |  |
f | 0 | u | |
| 外部源 |  |
f_{p_1}=f_1, u_{p_1}=u_1,f_{p_2}=f_2, u_{p_2}=u_2 | |||
在上表中,m 是质量;k 是弹簧的刚度;c 是阻尼系数;\dot u 和 \ddot u 分别表示组件的速度和加速度。
除了标准组件外,这个接口中还引入了其他几个组件。其中一个是阻抗,用于产生位移和力的差异。另一个是外部源,可用于将分布式模型连接到系统的集总模型。外部源连接机械系统中的两个节点。外部源的方程可以在集总机械系统 接口内部或外部定义。分布式模型中两个节点的位移可以指定为使用外部源的集总模型的输入。
在下面的屏幕截图中,点位移分别被用作端口2和端口4的输入。相应地,在这个端口计算的力作为输入传输到多体动力学 接口。这确保了这些点的位移和力的连续性。
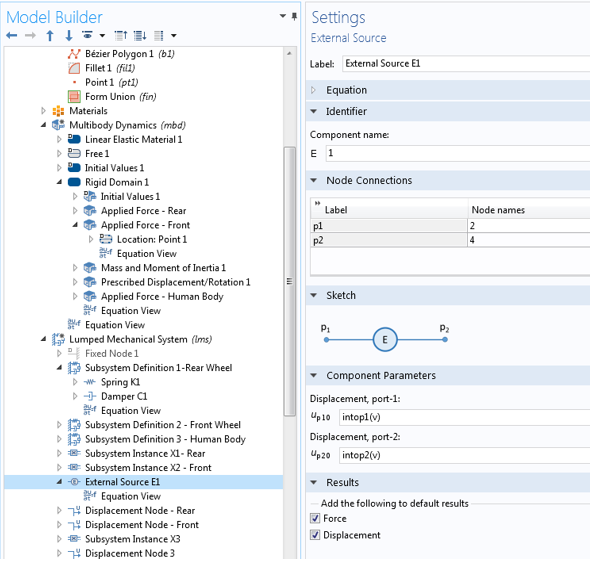
分布式模型和集总模型之间的位移和力的耦合。
子系统定义 节点用于定义子系统。在这个节点下,可以访问所有组件来定义子系统,然后可以使用子系统实例 节点将其作为组件插入到主系统中。例如,考虑一个由四个相同的轮胎和五个座椅组成的汽车模型。假设轮胎和座椅独立使用不同配置的弹簧阻尼系统建模。可以为一个轮胎和一个座椅创建子系统,而不是创建具有四个轮胎和五个座椅的组件模型。子系统实例 节点用于定义每个子系统的实例,可用于将子系统与其他系统连接起来。
单端口组件用于在 n 个端口网络的单个端口上以位移、力和阻抗的形式分配边界条件;例如,在单点上建立机械电路模型和与分布式模型的耦合关系。下表列出了 COMSOL Multiphysics 集总机械系统 接口中可用的单端口组件或终端:
| 单端口组件 | 示意图 | 描述 |
|---|---|---|
| 固定 节点 |  |
u_{p_1}=0 |
| 位移 节点 |  |
u_{p_1}=u |
| 速度 节点 |  |
v_{p_1}=\dot u=\frac{\partial u} {\partial t} |
| 加速度 节点 | 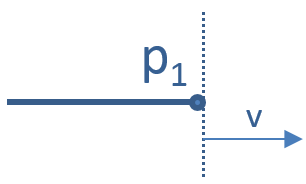 |
a_{p_1}=\ddot u = \frac{\partial^2 u}{\partial t^2} |
| 自由 节点 | 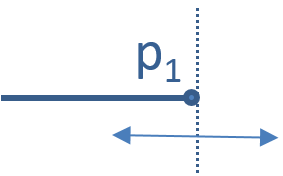 |
f_{p_1}=0 |
| 力 节点 | 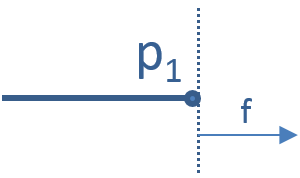 |
f_{p_1}=f |
| 阻抗 节点 | 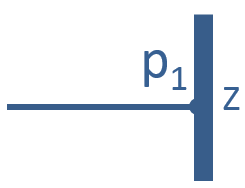 |
Z=\frac{f_{p_1}}{v_{p_1}} |
在 COMSOL Multiphysics® 中实现集总机械电路
要在 COMSOL® 软件中对机械电路进行建模,第一步是创建电路并标记其所有端口。例如,如果质量块、弹簧和阻尼器并联连接,则电路将由三个端口(1、2 和 3)组成。质量可以设置在端口 1 和 2 之间,弹簧和阻尼器可以位于端口 2 和 3 之间(见下图)。
该电路既可以用作子系统,也可以应用适当的边界/终端条件来获得组件上的位移/力。考虑系统在端口 1 处以单位力被谐波激发,而端口 3 认为是固定的。这些端口条件可以分别使用力 节点和固定 节点分配,并且可以使用频域研究计算谐波响应。
数值实验中使用的值是:
- 质量,m = 10 kg
- 刚度,k = 1e4 N/m
- 阻尼系数,c = 10 N*s/m
质量-弹簧-阻尼器系统的频率响应在 1 到 10 Hz 的频率范围内计算,频率步长为 0.1 Hz。下图显示了位移 u 与频率的幅度。

使用双端口组件表示的质量-弹簧-阻尼器系统示意图。
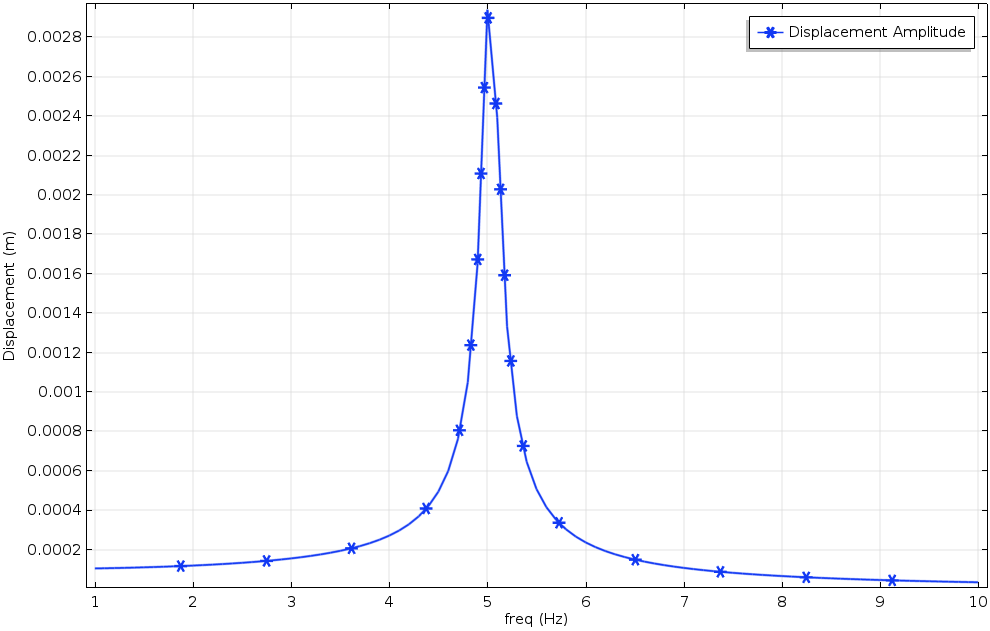
计算的频率响应。
如果要连接这些单元的复杂网络,那么应该为所有节点都分配一个编号。指定编号后,在 COMSOL Multiphysics 中选择适当的单元,并指定节点编号以及单元的属性,例如弹簧的刚度、阻尼器的阻尼系数等。
如果主系统中存在多个子系统,那么可以使用集总机械系统 接口中的子系统定义 节点对这些子系统进行建模。我们将使用集总元件创建的人体模型进行演示。这种四体模型,也称为 LN 模型,是人体最常用的集总表示之一。该模型由四个质量(m_1,m_2,m_3,m_4);五个弹簧(k_1,k_2, k_3,k_4,k_5);和三个阻尼器(c_1,c_2,c_3)组成。
在模型中,整个人体被分为四个部分:
- 下部刚性质量 (m_1)
- 下部振动质量 (m_2)
- 上部刚性质量 (m_3)
- 上部振动质量 (m_4)
在这里,振动质量包括所有非刚性部分的质量,例如肌肉、皮肤和血管。如下图所示,身体模型由 4 个自由度组成,各组件标记为从 0 到 a。该系统有一个终端(标有 a),可用于激励。这种类型的模型可用于计算不同激励下系统的任何质量上的响应。假设我们需要计算一个人坐在车里时的全身振动(WBV)。终端 a 可以连接到汽车模型(分布式模型)中的任一点,汽车在该点的位移可以作为输入来激励集总系统。
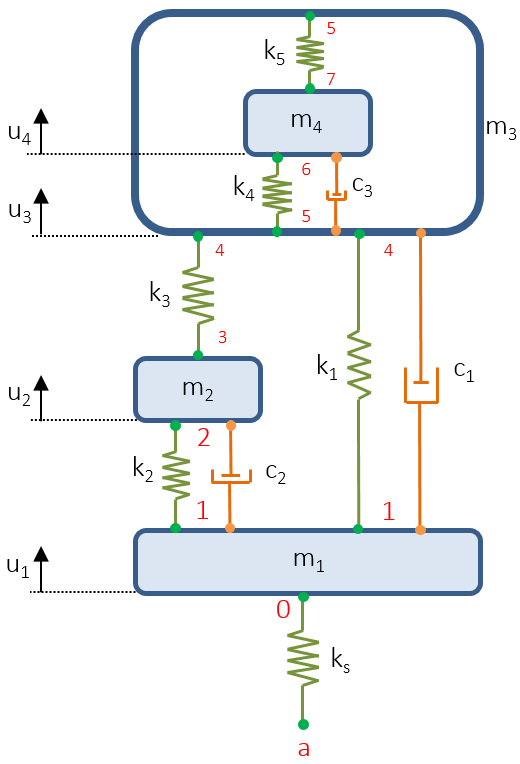
人体的集总模型。
将机械电路模型添加到一个分布式系统上
如前一节所述,为了将集总模型添加到分布式系统(可以是多体系统),需要将力和位移耦合起来。由于机械回路在某个点连接到分布式系统,因此系统的位移用作机械电路的输入,而力在连接点从电路传递到主系统(如下所示)。
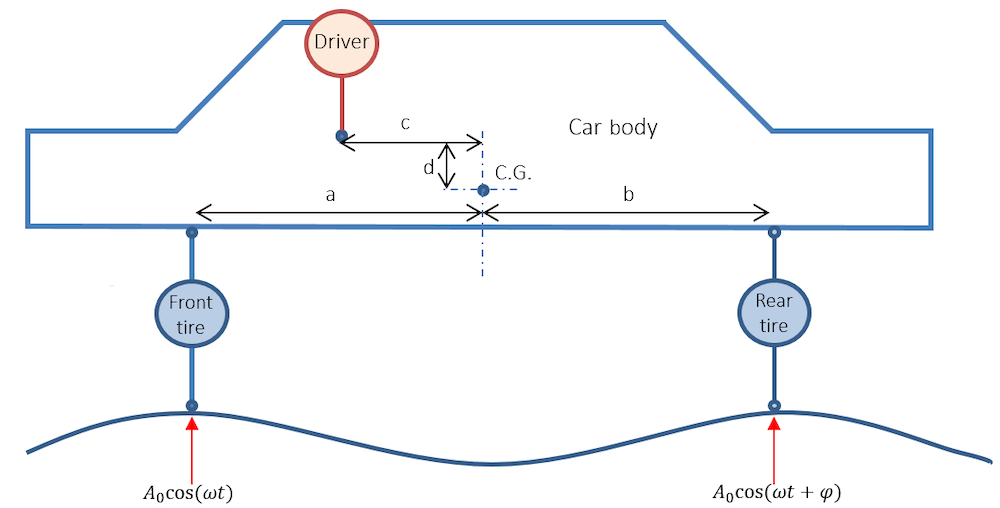
使用多体动力学建模的汽车示意图,其中驱动程序、前轮胎和后轮胎使用集总电路建模。
在这个示例中,使用多体动力学对二维车身进行建模。这辆车由前后轮胎组成,驾驶员坐在驾驶座上。汽车是使用质量为 m = 2667.24 kg 和 转动惯量为 2788.07 kg/m2 的刚性域建模的。
轮胎从地面获得谐波激励,相位差为 160 度,可复制道路上的颠簸和起伏。轮胎是使用一个平行连接的弹簧和阻尼器系统建模的。轮胎的刚度和阻尼比分别为 k_f = 553.28 kN/m, k_r = 496.38 kN/m, c_f= 2.374 kN/m/s,c_r = 4.434 kN/m/s。
人体的机械电路用于对驾驶员进行建模。模型中使用的参数的详细信息如下表所示:
| 参数 | 值 | 单位 |
|---|---|---|
| m_1 | 6.15 | kg |
| m_2 | 6 | |
| m_3 | 12.58 | |
| m_4 | 50.34 | |
| k_1 | 6 | kN/m |
| k_2 | 6 | |
| k_3 | 10 | |
| k_4 | 10 | |
| k_5 | 18 | |
| k_s | 25.5 | |
| c_1 | 0.3 | kN/m/s |
| c_2 | 0.65 | |
| c_3 | 1.9 |
轮胎和人体在不同的点与车身相连,如下图所示。


轮胎被定义为双端口子系统(左),人体被定义为单端口子系统(右)。
轮胎和人体分别使用双端口和单端口子系统定义。使用子系统的优势在于,无论模型的复杂程度如何,都可以使用一个或两个端口进行连接。然后使用子系统实例 节点来表示子系统的实例。
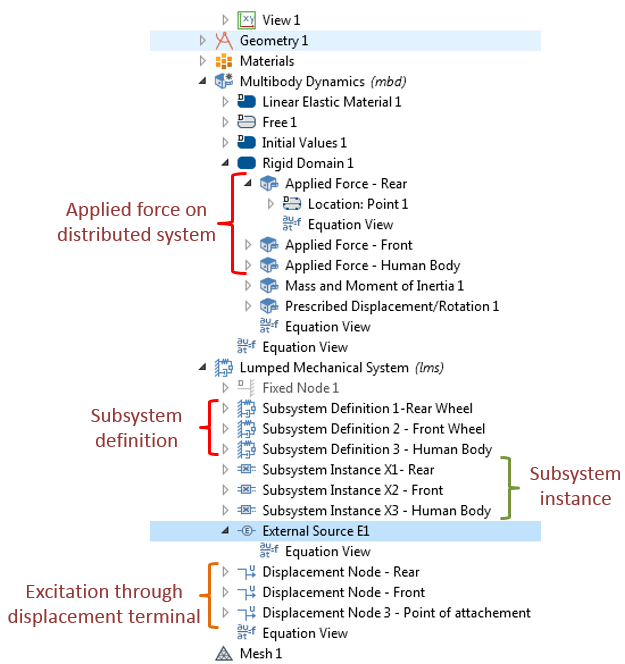
集总机械系统和分布式模型(多体动力学接口)中节点的表示。
同样,完整的系统是通过节点编号创建的(就像在为人体机械电路建模时那样)。三个不同的子系统实例 节点用于表示三个不同子系统(分别为后轮、前轮和人体)的实例。
选择外部源 选项以使用双端口系统从分布式模型输入位移。由于人体子系统是单端口子系统,因此使用位移终端 节点指定位移,并且来自该节点的力在连接点被传递到分布式系统。
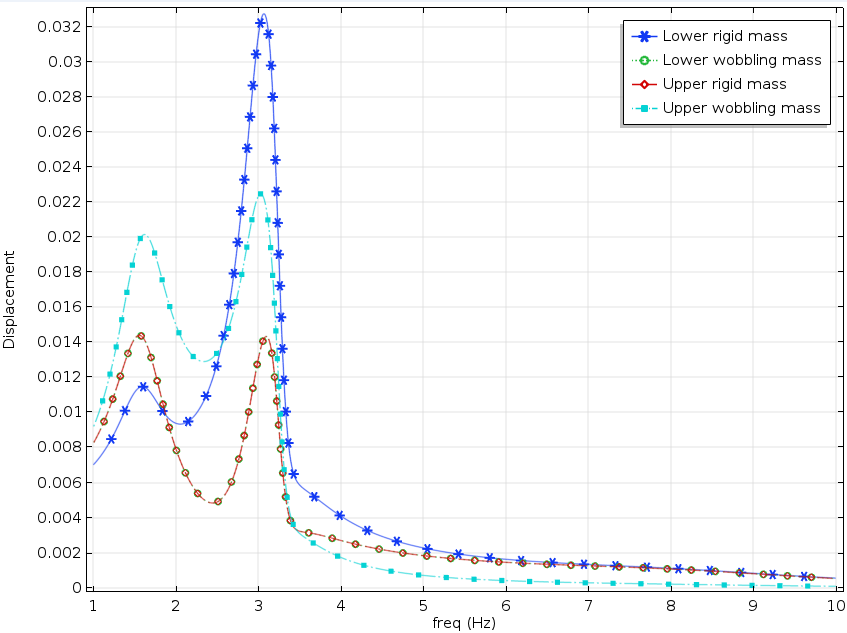
人体各个组成部分的频率响应图。
以 0.01 Hz 的频率步长对 1 到 10 Hz 的频率范围进行频域分析。上图中计算并绘制了各组件的频率响应。如图所示,响应在 1.58 Hz 处有一个峰值,这也是人头的自然频率。
结语
这篇博客,我们使用质量-弹簧-阻尼器和人体集总机械电路的示例模型讨论了集总机械系统 接口并解释了其不同的组件和应用。还演示了将集总电路耦合到分布式系统的过程。
集总机械系统 接口被证明是一种有用的建模工具。然而,使用机械电路的局限性在于它们仅限于单一方向并且只能处理线性问题。
下一步
单击下面的按钮,了解 COMSOL Multiphysics 的附加组件——结构力学模块中可用于结构分析的各种功能。(请注意,此处讨论的功能还需要多体动力学模块。)
了解有关使用集总机械系统 接口对车辆悬架系统建模的更多信息。

评论 (0)