
如今,大多数人在驾车旅行时都会连接 GPS 导航设备。但当车辆进入地下通道或高楼之间时,GPS 信号可能会中断,这就是许多车辆、手机等设备都带有惯性测量单元或惯性传感器的原因。惯性传感器使用的陀螺仪和加速度计非常小巧并且精确度高,用于确定与地球正交轴x、y和z相关的运动。使用 COMSOL Multiphysics®软件,我们可以对惯性传感器的组件(包括 MEMS 陀螺仪和加速度计)进行建模。
“你在这里”遇到“就这样结束了”
想象一下,一片暗黑色的天空中布满了成千上万的白点,它们排列成的形状显示出它们正处在银河系。在银河系上方,有一个箭头指向其中一个小点,上面毫无意义的写着几个文字:“你在这里”。

一个没有任何参照系的导航仪示例。
这个古老的笑话可能会出现在许多书呆子的 T 恤和教授的门上,就像天空中的星星一样,它确实隐含了一些关于导航(还有生活)的相对论本质的真理。也许它给我们的主要教训是,一个物体的位置只有在与它周围的空间相关的情况下才能进行有用的描述。在导航中,这个空间就是参考系。
当我们在道路地图上绘制路线时,是在一个二维参考系中导航。仅凭一张地图无法知道我们是在上坡还是下坡,或者我们的车辆是否有翻车的风险。配备惯性传感器的导航系统可以通过测量线加速度和角加速度来计算车辆在三维空间中的轨迹。有了三个分别沿x轴、y轴或z轴定向的加速度计,我们就可以跟踪三维空间中的线性运动。同样,用三个分别沿x轴、y轴或z轴的定向陀螺仪,我们就可以测量三维空间中的旋转(参考文献 1)。
脑袋里的石头?它们是你的加速度计的一部分
如果你做了一件蠢事,你可能会被问“你脑袋里有石头吗?”如果发生这种情况,你可以如实回答:是的,我们都有!即使是傻瓜也应该知道它们非常重要!每一种脊椎动物的身体里都含有主要由碳酸钙(石灰石的主要成分)组成的微小耳石。我们脑袋里的这些石头是身体自然加速度计不可或缺的一部分(参考文献 2)。
加速度计由一个质量块组成,悬挂在与外壳相连的柔性结构上。当外壳加速时,质量块也会加速,从而对悬架造成可以测量的应变。对于我们耳朵内的加速度计而言,质量块是一束耳石。这束耳石附着在一层薄膜上,薄膜悬挂在细微的毛发和黏附的神经上,当质量发生变化时,这些神经会捕捉到电信号变化。这个有机的加速度计附着在我们的内耳结构上,是人体的参照系。
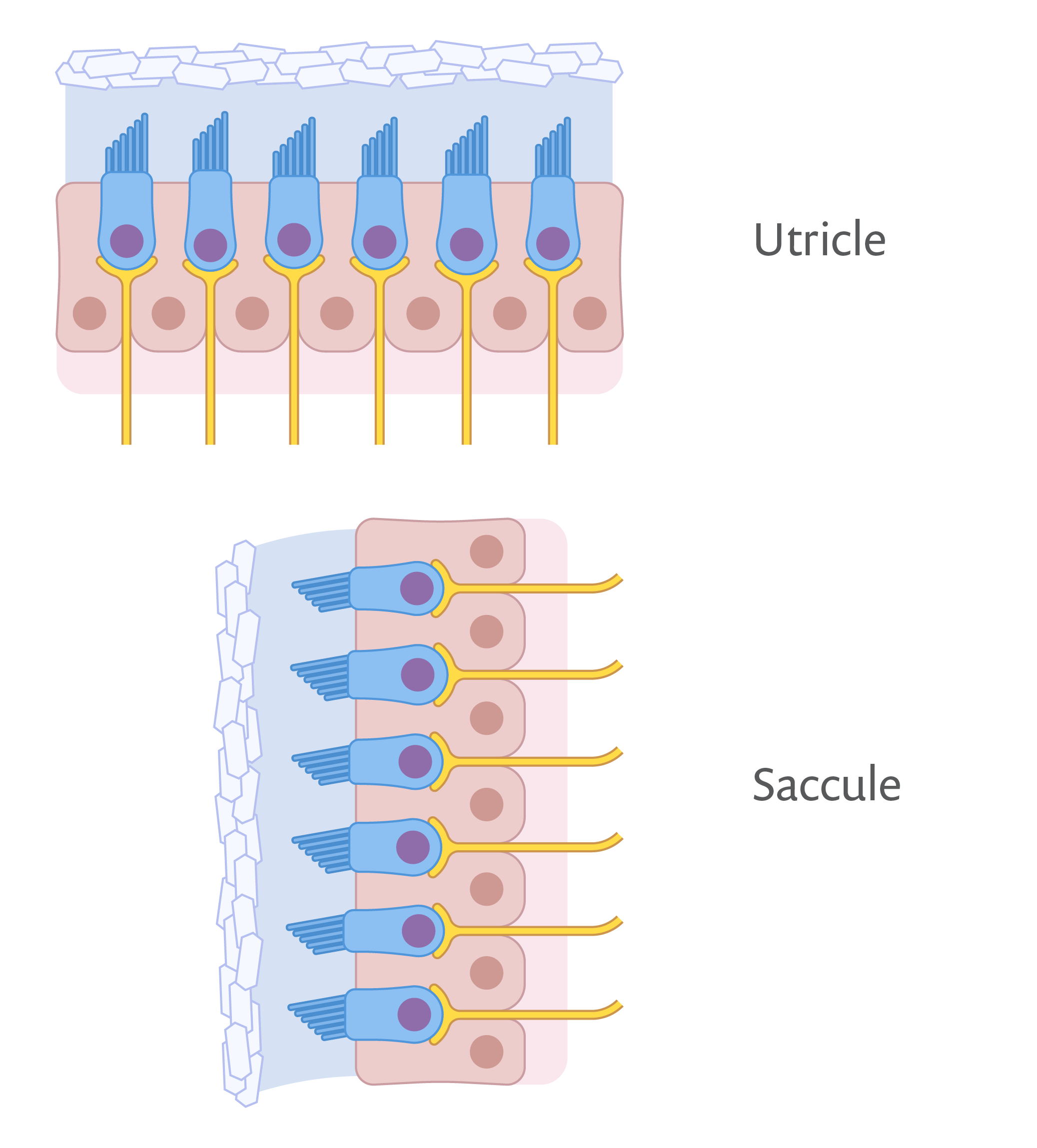
人的每只耳朵里都有一个水平放置的椭圆囊和一个垂直放置的球囊。每一个微型囊结构都包含一个悬浮的质量块,它会刺激附着的神经对加速度作出响应。(参考文献3)
当我们的身体突然移动时,质量块的位移会提醒神经有跌倒的可能性。因此,我们的神经可以探测到身体的运动,即使其他感觉器官(例如眼睛或耳朵),失去了它们的参照系。表面微机械加速度计为设备和车辆提供了类似的功能。
MEMS 加速度计仿真“积木”
本文介绍的教程模型演示了如何使用 COMSOL 软件 MEMS 模块的机电多物理场接口对表面微机械加速度计进行建模。该模型由三个子组件组成:质量块、支撑质量块的锚定弹簧和电极阵列。请浏览下列图片查看所有三个子组件以及完整模型。
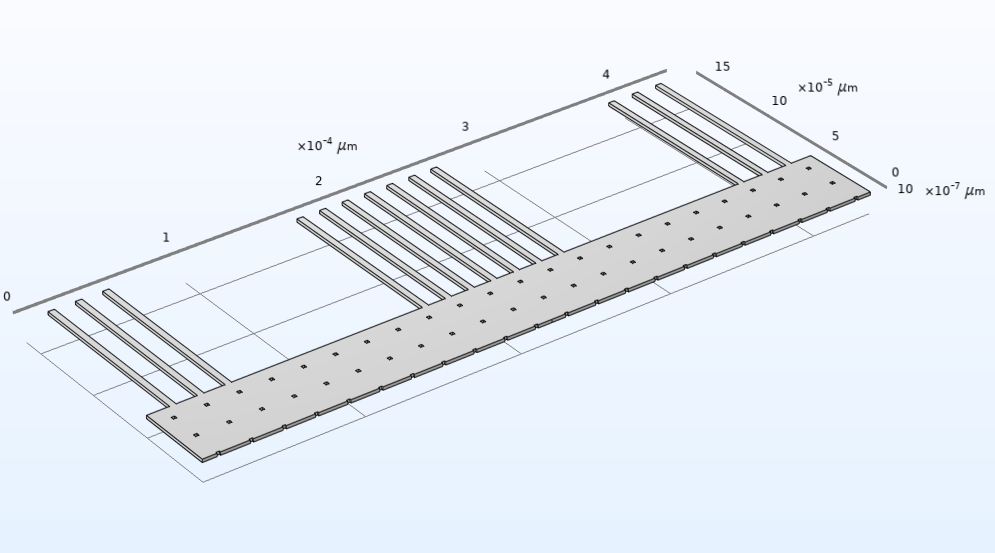
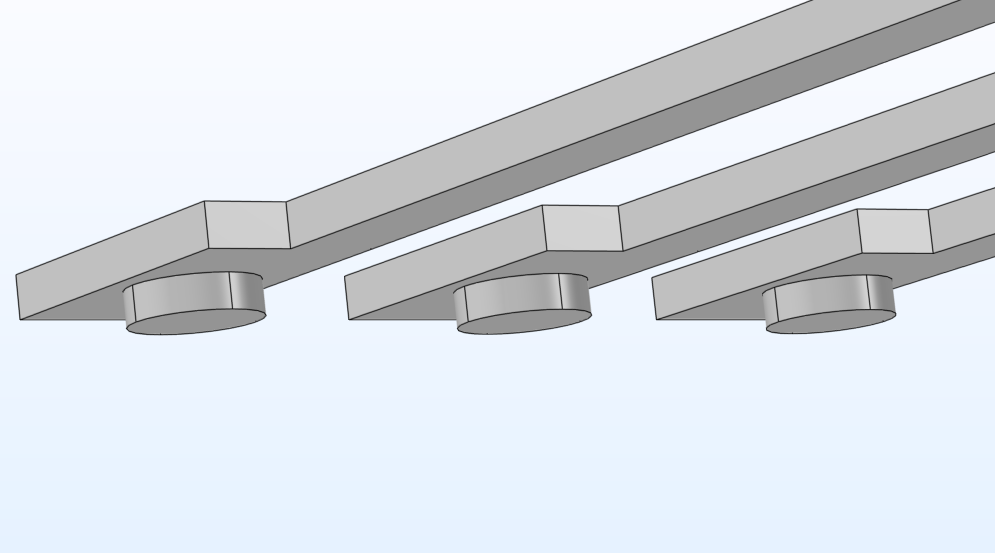
为带电极的质量块构建结构。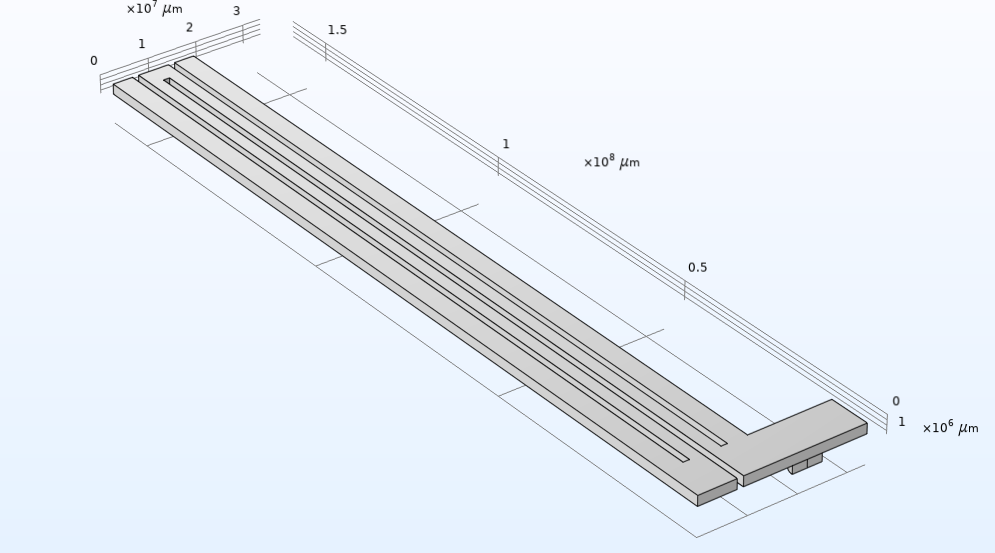 为锚定弹簧构建几何。
为锚定弹簧构建几何。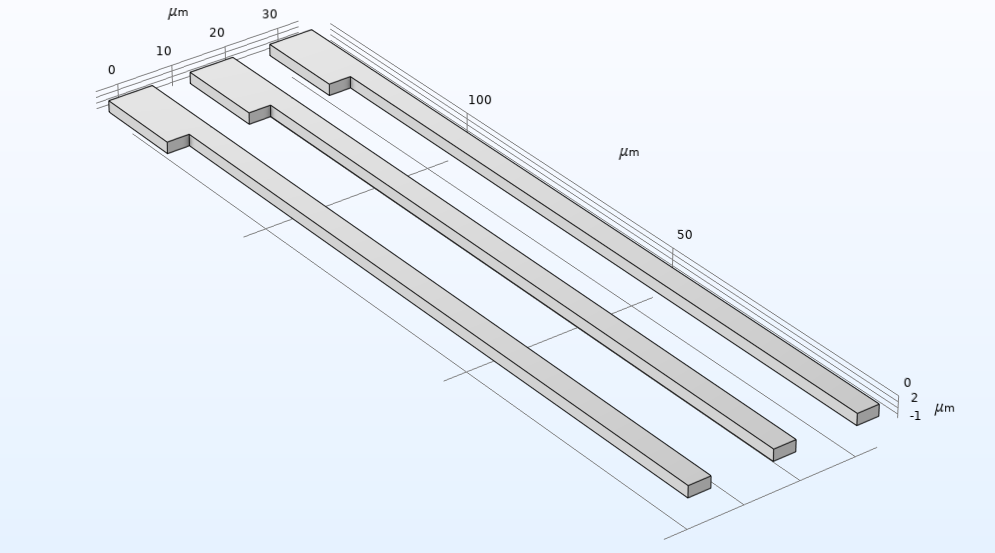
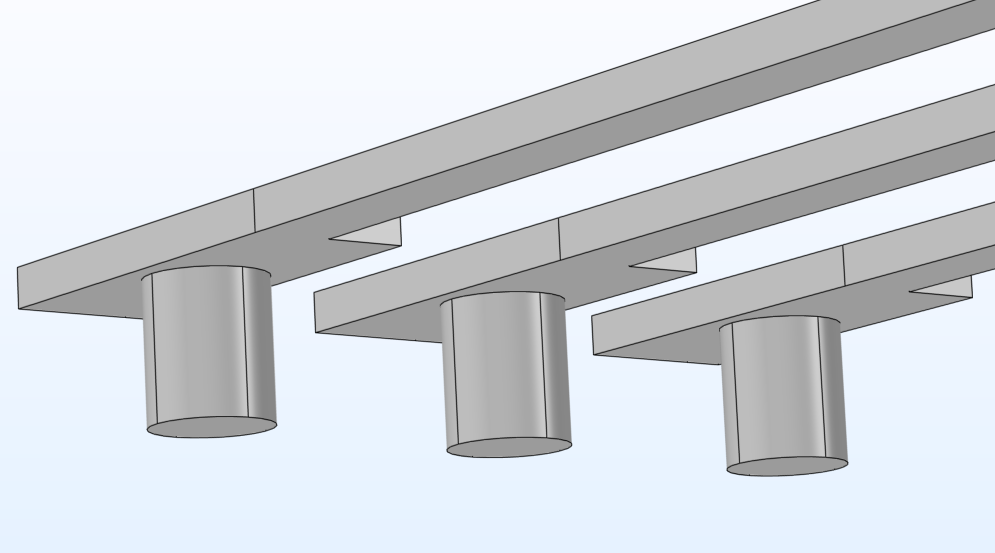
为固定电极阵列构建几何。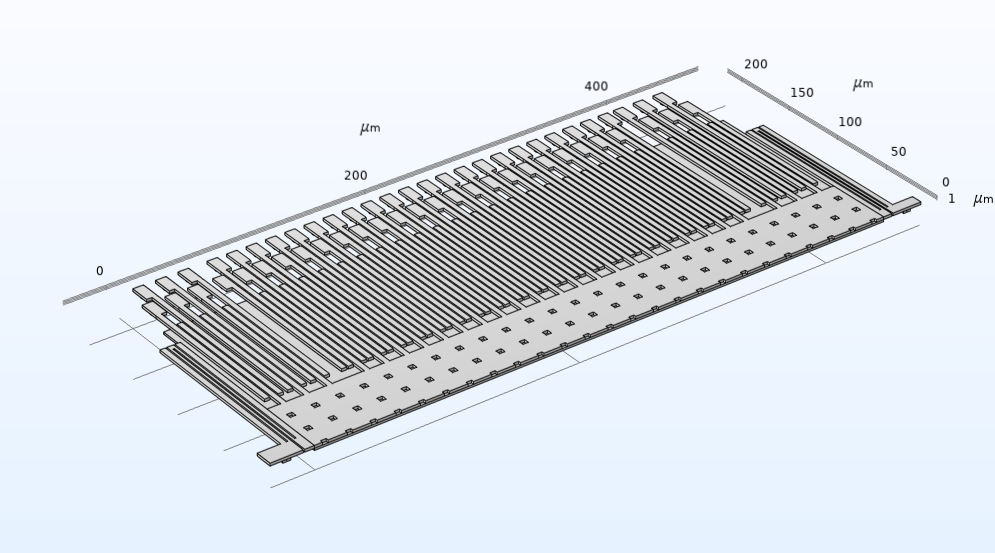
表面微机械加速度计模型的完整几何结构。
当器件受到加速度时,质量块将发生位移,从而改变固定电极和移动电极之间的电容。电容的变化与加速度成正比。
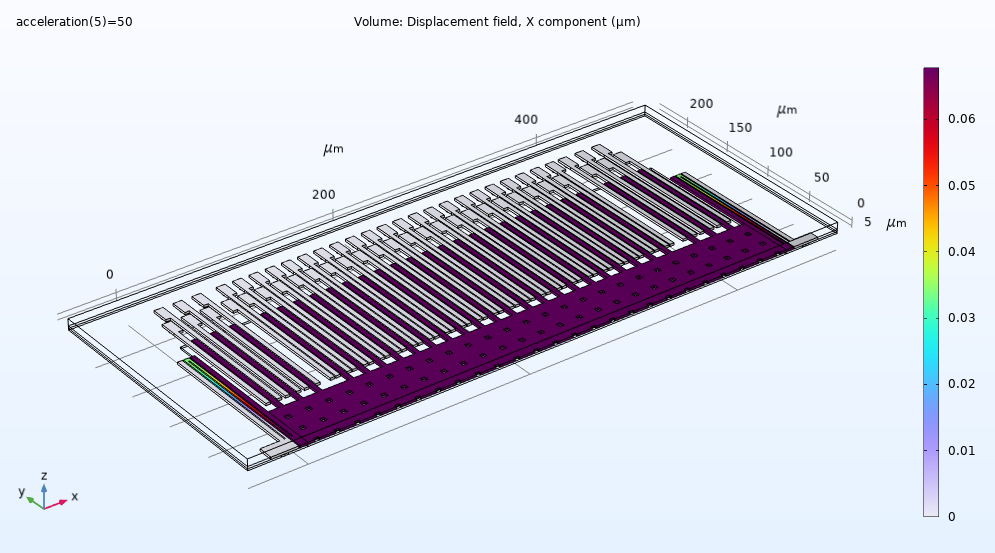
施加了 50 个 g 的加速度时的位移。在这个示例中,质量块移动了大约 0.07 μm。
在定义模型时,我们可以指定质量块、弹簧和电极三个核心组件的尺寸、方向和其他属性。还可以通过调整这些模块化积木(也称为子序列)的关键属性值来测试不同的设计选项。这种模块化支持模拟原型机和加速度计的配置和测试。
左侧是加速度计模型的模块化“积木”电极阵列。右侧重新设计的阵列是通过调整关键属性从相同的模块化子序列构建出来的。
音叉陀螺仪的起伏
就像大自然为一些动物配备了加速度计一样,另一些动物也自带陀螺仪!家蝇、蚊子和其他飞虫有两个称为平衡棒的附件,如下图中鹤蝇的翅膀后面所示:
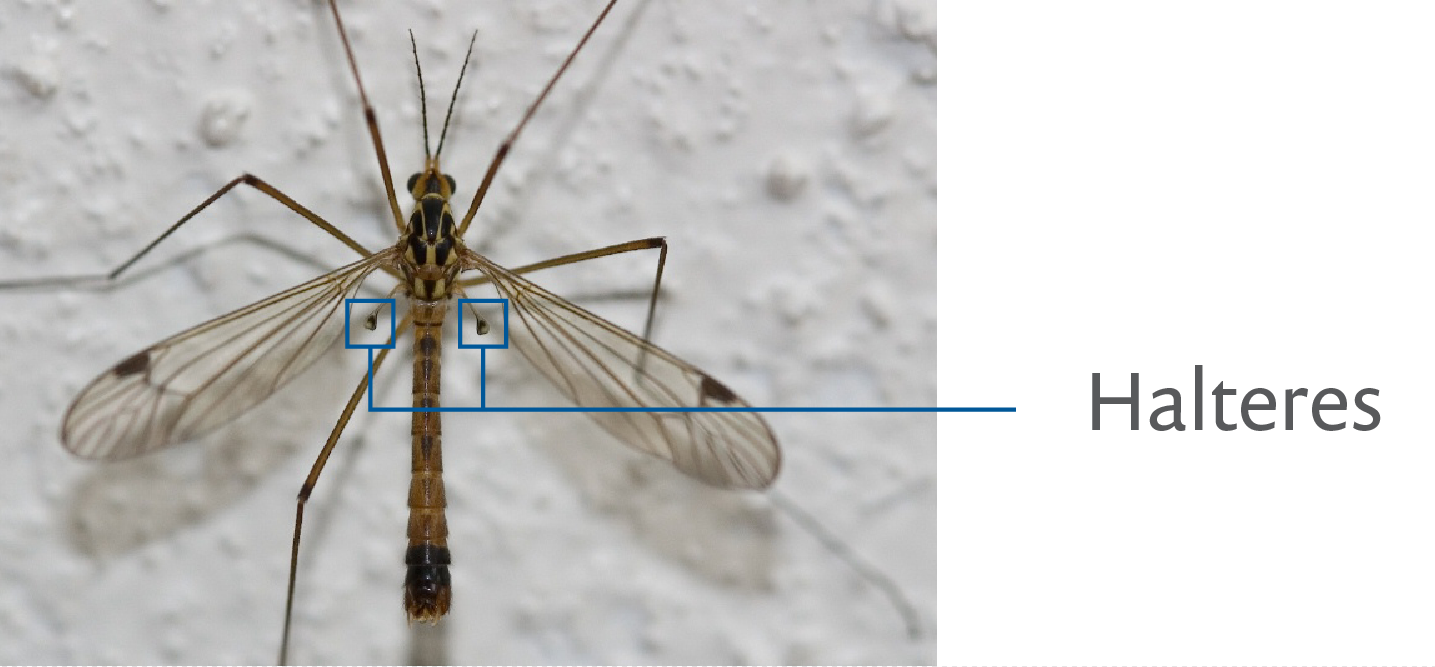
鹤蝇的俯视图,显示了平衡棒的位置。图片来自Andre Vrijens,通过Wikimedia Commons获得许可(CC BY 3.0)。
昆虫的平衡棒随着它的翅膀迅速拍动。在水平飞行中,平衡棒的运动沿着向上和向下的路径进行。但是当昆虫倾斜它的身体时,平衡棒的路径会因科里奥利效应而发生变化,向左右移动和上下移动。昆虫通过它们对附着的毛发施加的压力来感知平衡棒的移动,这个信息使它们能够控制相对于它的飞行路径的方向。
压电速率陀螺仪就是根据类似的原理工作的。接下来,我们来探索一个陀螺仪模型,了解它是如何工作的。
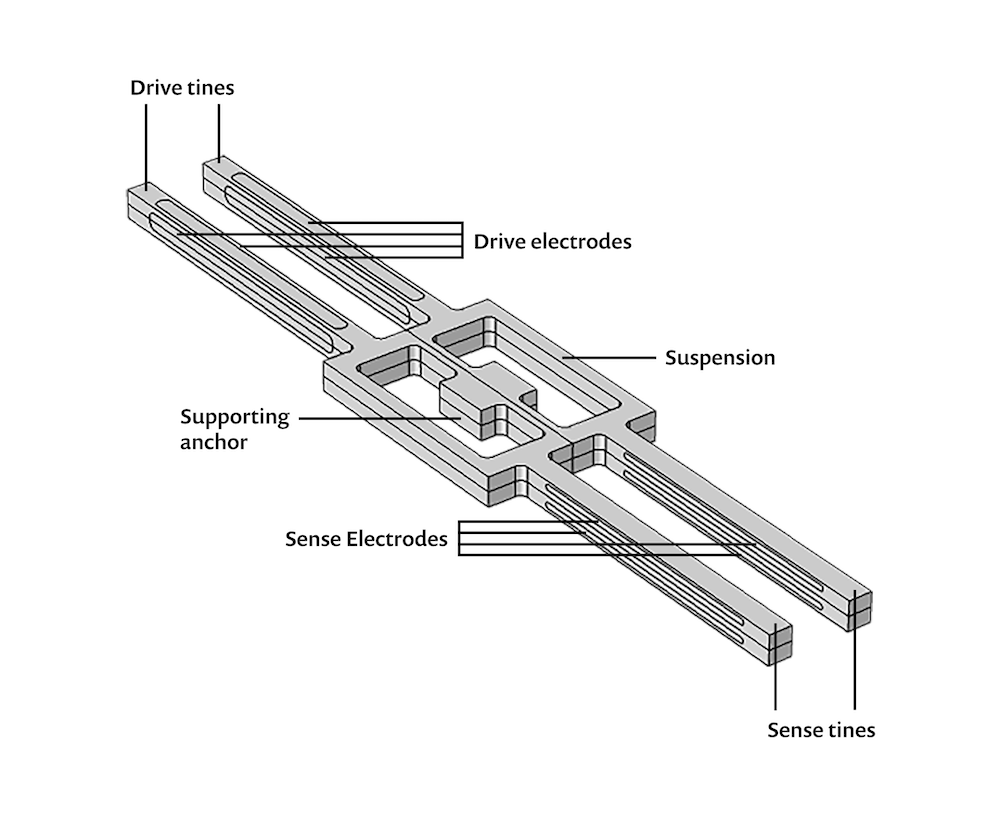
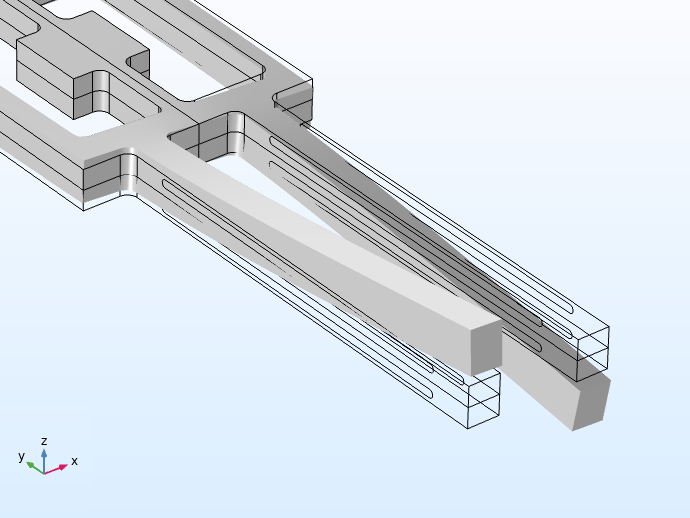
模拟的音叉陀螺仪示意图,显示了通过器件中心和关键组件的对称平面。
陀螺仪中心的矩形结构是它的悬架,其中的支撑锚将陀螺仪固定安装在器件上。两对突出的组件是驱动尖齿和感应尖齿,这些尖齿上的电极使它们能够提供有关器件方向的有用数据。
为了解释这个器件是如何工作的,我们来考虑当器件相对于它的参考坐标静止或匀速运动(没有线性或旋转加速度的运动)时尖齿的行为。我们将研究当器件旋转时尖齿的行为如何变化。施加到驱动尖齿的电信号导致感应尖齿在xy平面中以它们的谐振频率振动。当设备绕y轴旋转时,科里奥利力会导致面外振动,如下图所示。
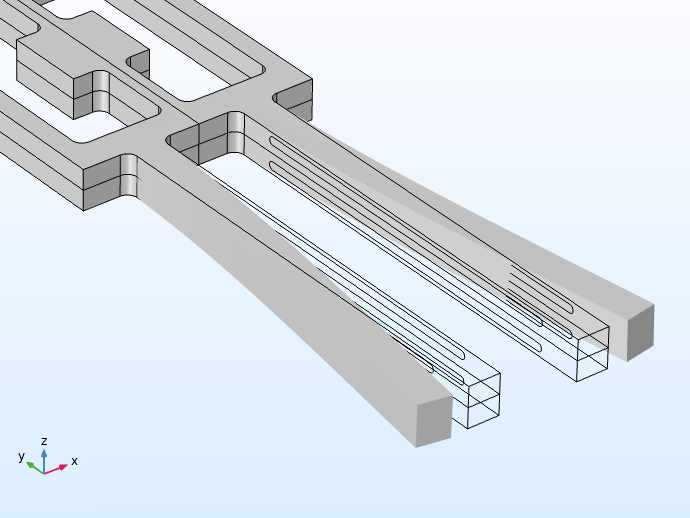
在左侧的图中,当器件匀速运动时施加电流会导致尖齿沿xy平面振动。在右侧图中,器件绕y轴旋转会导致沿z轴的面外振动。
请注意,驱动尖齿和感应尖齿具有不同的谐振频率。当陀螺仪工作时,驱动尖齿中的电极通过反向压电效应刺激它们以共振频率振动。当整个设备绕y轴旋转时,产生的科里奥利力将激发感应尖齿在平面外振动,这种运动将通过直接压电效应在感应尖齿的电极中产生电流。


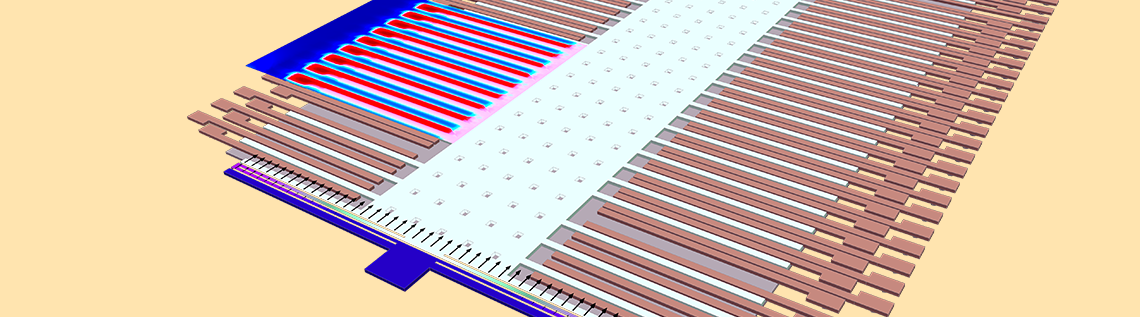
左图显示了器件匀速运动的两个曲线,没有加速或旋转。请注意,尖齿在xy平面中振动。在右侧图中,设备绕y轴旋转,导致尖齿在xy平面外振动。在这两幅图中,左侧的图表显示的颜色变化用于指示位移的大小,而右侧显示了尖齿在空间中的实际位移。
动画显示了当器件围绕y轴旋转时尖齿的行为,导致面外振动。左边的颜色变化表示位移的大小,而右边的图像显示了空间中的运动。
你在这里,是终点,也是起点……
感谢您读完这篇文章!您可以点击下面的链接进入 COMSOL 案例库,继续您的 MEMS 加速度计和陀螺仪建模之旅:
- 模拟加速计:表面微机械加速度计几何?
- 以陀螺仪模型为例:压电速率陀螺仪
更多有关压电器件建模的信息
参考文献
- B. Schweber, “The Autonomous Car: A Diverse Array of Sensors Drives Navigation, Driving, and Performance”,https://www.mouser.com/applications/autonomous-car-sensors-drive-performance/
- D. Purves, G.J. Augustine, D. Fitzpatrick, et al., editors, “The Otolith Organs: The Utricle and Sacculus”,Neuroscience. 2nd edition. Sunderland (MA), Sinauer Associates, 2001;https://www.ncbi.nlm.nih.gov/books/NBK10792/
- T. C. Hain, “Otoliths”, Mar. 2021;https://dizziness-and-balance.com/disorders/bppv/otoliths.html

评论 (0)