多体动力学模块更新
COMSOL Multiphysics® 6.0 版本为“多体动力学模块”的用户引入了改进的刚体接触、部件模态综合法以及针对任意位置点载荷的新特征。请阅读以下内容,进一步了解该模块的新增功能和更新功能。
部件模态综合法
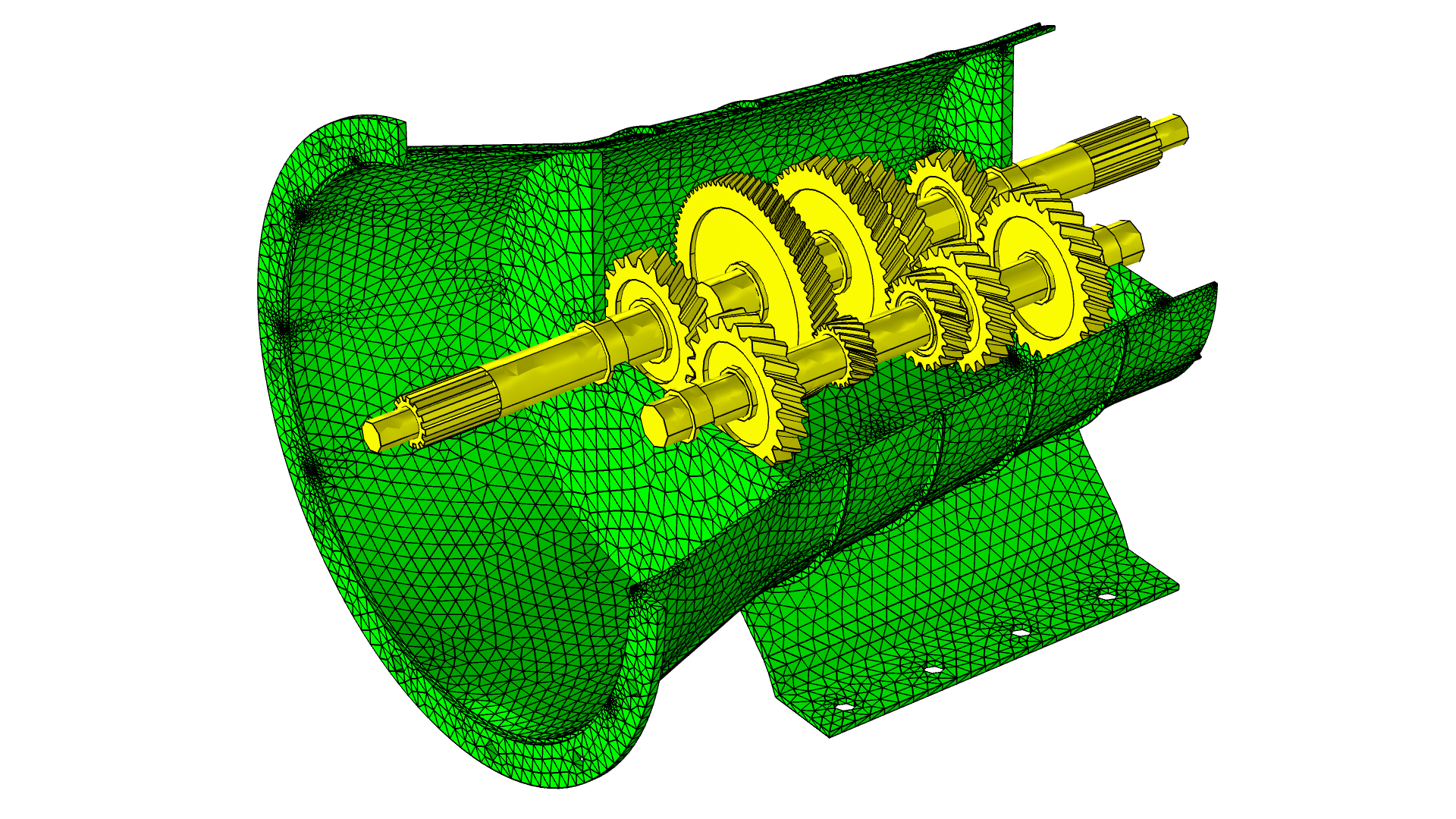
使用固体力学 和多体动力学 接口建立的线性部件可以用 Craig–Bampton 方法降阶为计算效率高的降阶模型。然后,您可以将这些组件用于动态或静态分析,或者用于完全由降阶部件组成的模型,也可以将它们与未降阶的弹性有限元模型一起使用,后者可以是非线性的。这种方法称为部件模态综合法 (CMS) 或动态子结构,可以在计算时间和内存使用率方面带来很大的改进。您可以使用与模型的任何其他部分相同的方式呈现降阶部件中的结果(如应力和应变)。您可以在变速箱的振动和噪声建模:CMS 版本教学案例中查看这一新特征的应用演示。
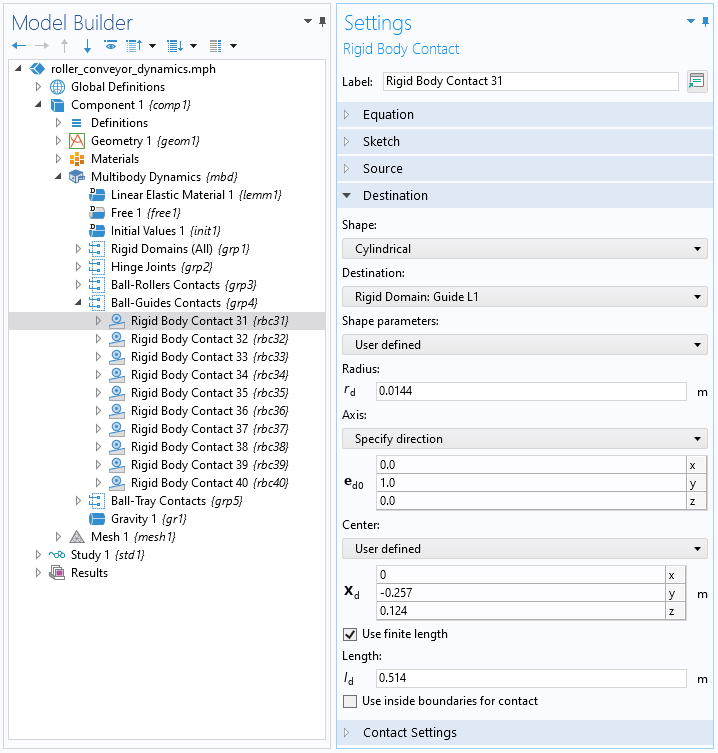
刚体接触中新增圆柱型形状
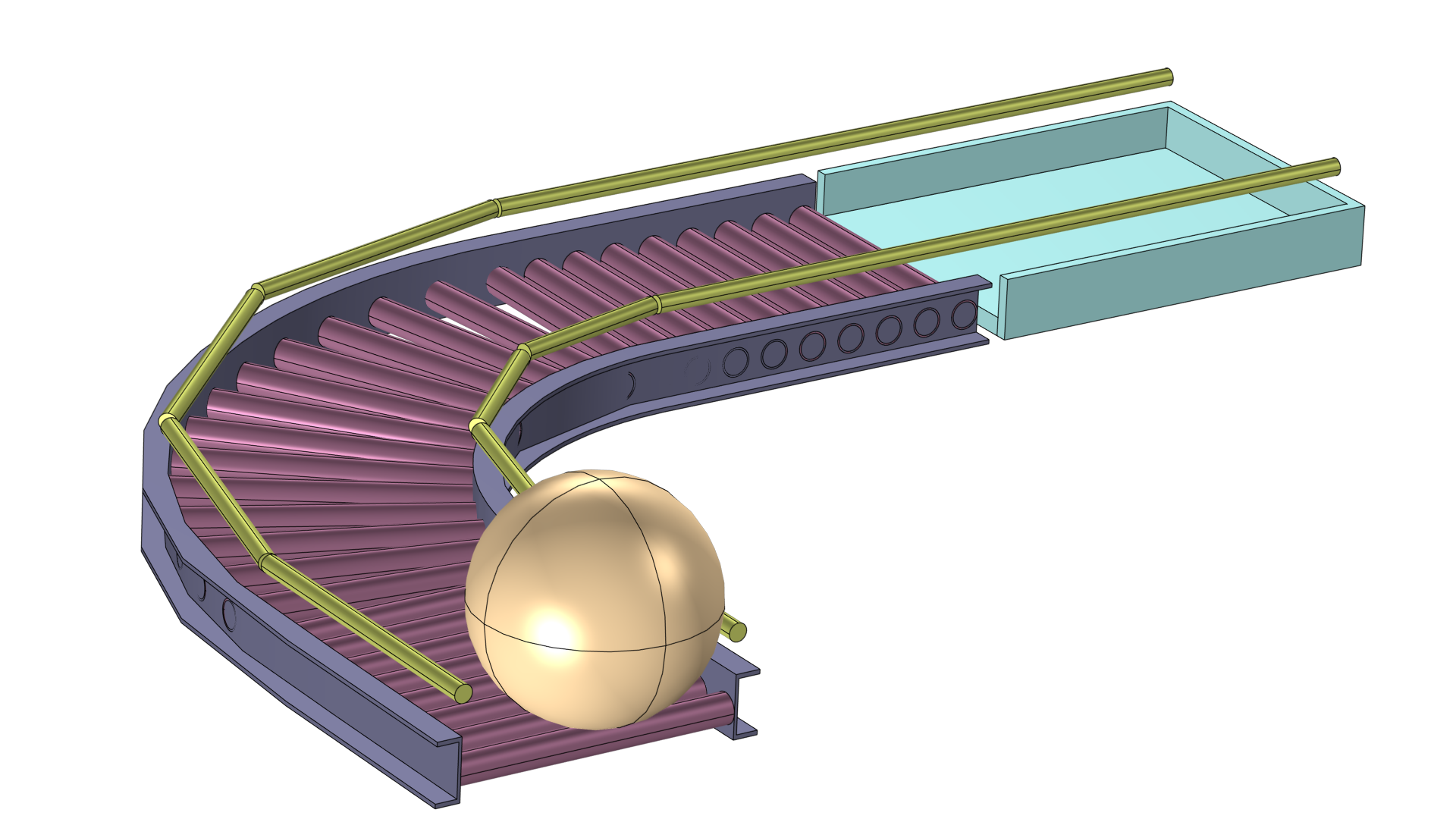
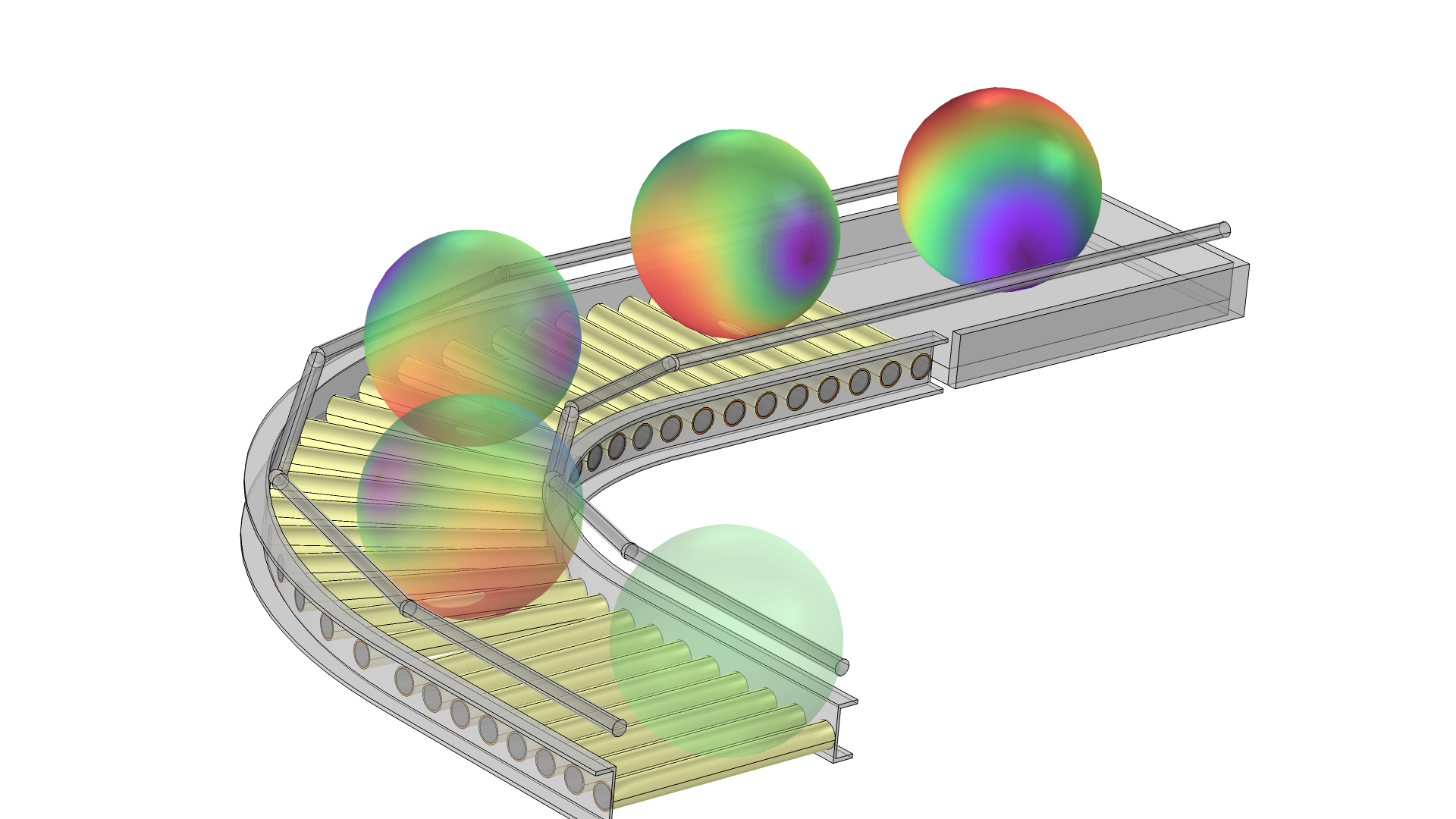
多体动力学 接口提供的刚体接触 特征得到了扩展,在三维和二维中提供了附加的标准形状。现在还支持三维圆柱型 形状,您可以对球体-圆柱体以及圆柱体-圆柱体接触进行建模。例如,新增的圆柱体-圆柱体接触可以处理以下情况:
- 平行、相交,或既不平行也不相交的构型
- 有限或无限圆柱体
- 外部或内部接触
您可以在辊子输送机动力学教学案例中查看这一新特征的应用演示。
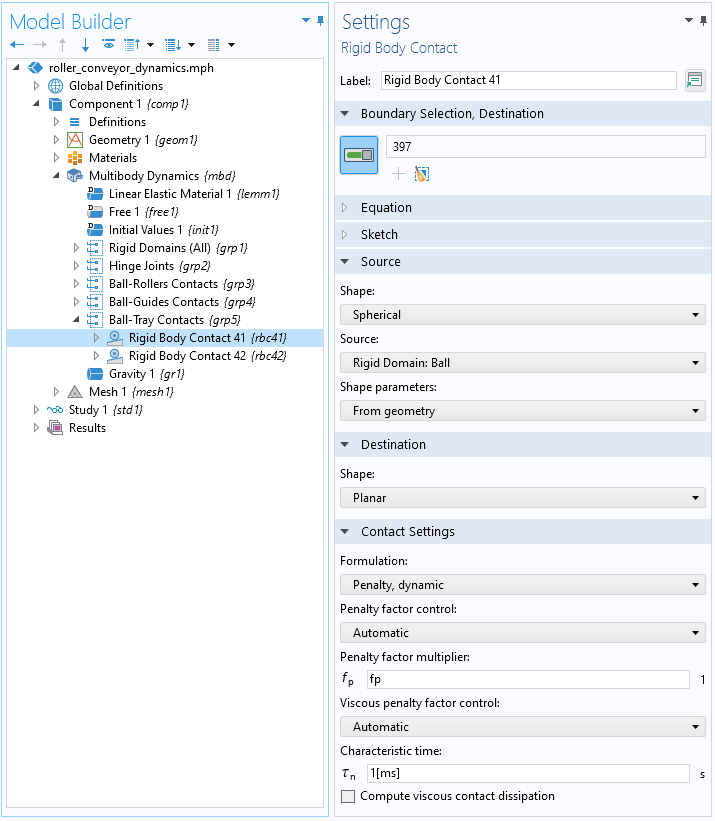
刚体接触中新增平面形状
在以前的版本中,您可以使用刚体接触 特征中用户定义的任意 形状选项对平面形状的接触进行建模。现在,三维和二维的刚体接触 特征直接支持平面 形状,与以前版本中使用的基于网格的任意形状选项相比,计算效率更高。通过这个新选项,您可以在三维中对球体-平面以及圆柱体-平面接触进行建模,在二维中对圆形-平面接触进行建模。您可以在辊子输送机动力学教学案例中查看这一新特征的应用演示。
刚体接触中的形状参数计算
在之前版本的 COMSOL Multiphysics® 中,标准形状刚体的几何形状参数(如半径、中心、轴、长度等)由用户在刚体接触 节点中手动指定。现在,在二维和三维中,这种几何参数由选定的刚性域的几何形状自动确定,这使得建模过程更容易、更稳定。您可以在辊子输送机动力学教学案例中查看相关应用演示。
任意位置的点载荷
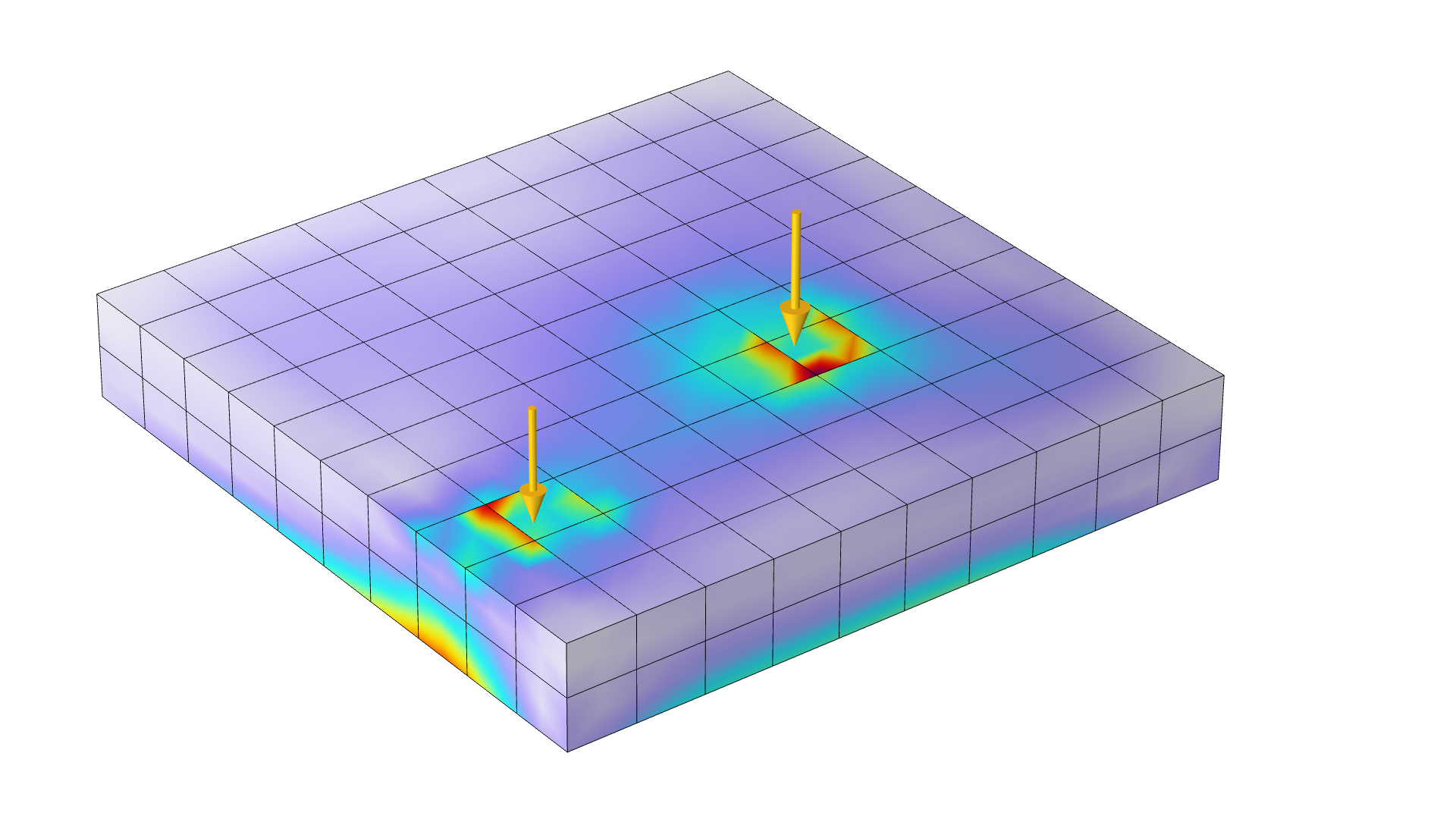
利用新增的点载荷,自由 和环形载荷,自由 特征,您可以在与几何点或网格节点不重合的任意位置施加点载荷,这在以下情况下尤其有用:
- 导入的网格,其中可能没有合适的点来承受载荷
- 动载荷
- 包含许多点载荷的模型,在这种情况下,在所有载荷位置创建几何点可能不切实际
您可以在固体力学、壳、板、膜、梁、桁架 和多体动力学 接口中使用此功能。
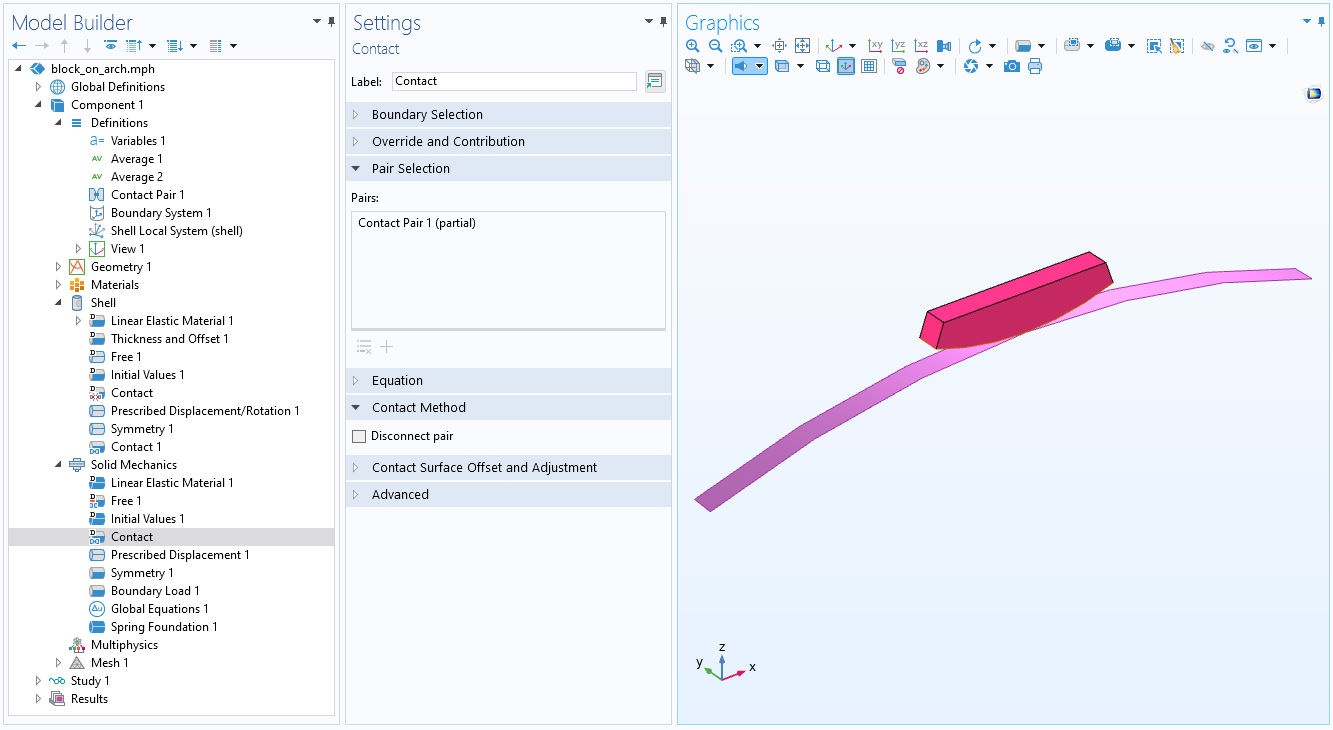
机械接触建模更加容易
您现在可以更容易地建立包含机械接触的装配结构分析,这得益于内置的对、接触和连续性自动化特征。如果模型中至少有一个接触对,那么软件将在相关的结构力学接口中自动创建一个默认的接触 节点。同样,如果至少有一个一致对,软件会自动创建一个默认的连续性 节点。因此,如果几何中的部件彼此相邻放置,那么从物理学的角度来看,它们也将被连接起来,前提是您在几何序列中的形成装配 节点中使用了自动创建对。
由于对功能的全面重构,不再需要接触 中的当前物理场的外部源 复选框,因此已将其移除。也就是说,不同物理场接口之间的接触也是自动处理的。
包含接触 或连续性 的所有模型都已相应更新。
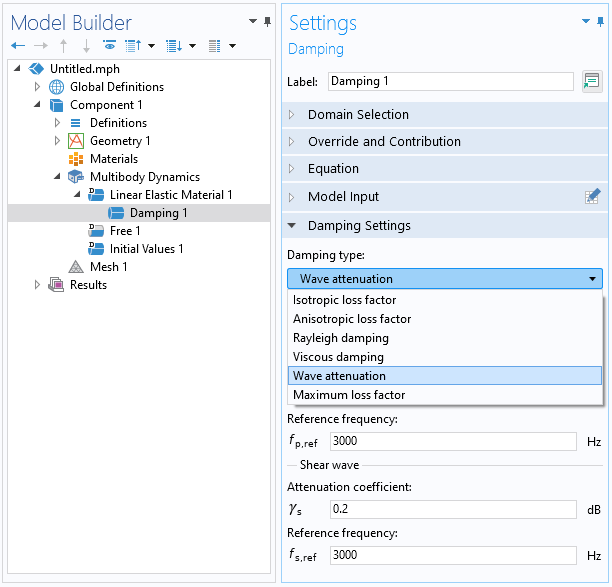
新增阻尼模型
新版本为线弹性材料 特征添加了新的阻尼模型:
- 波衰减 模型本质上是一个黏滞模型,其参数由材料中弹性波衰减的测量数据给出。
- 最大损耗因子 模型主要用于材料的时域分析,对于这些材料,损耗因子表示在频域中给出了充分的描述。
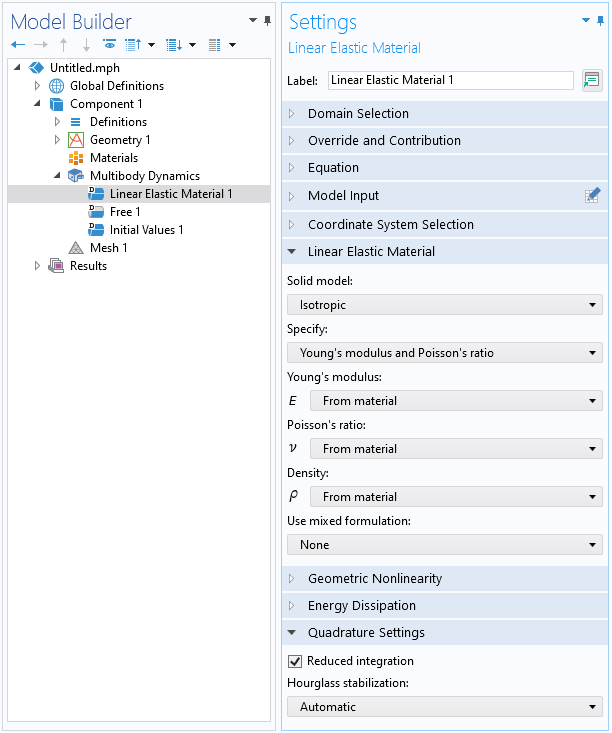
减缩积分
新版本新增了一个框架用于减缩积分。对于具有线性形函数的单元,减缩积分会导致刚度矩阵的奇异性。这可以通过增加沙漏稳定性来抵消。减缩积分由线弹性材料 节点中的正交设置 栏控制。选定的积分规则将被所有可能添加的子节点所继承。
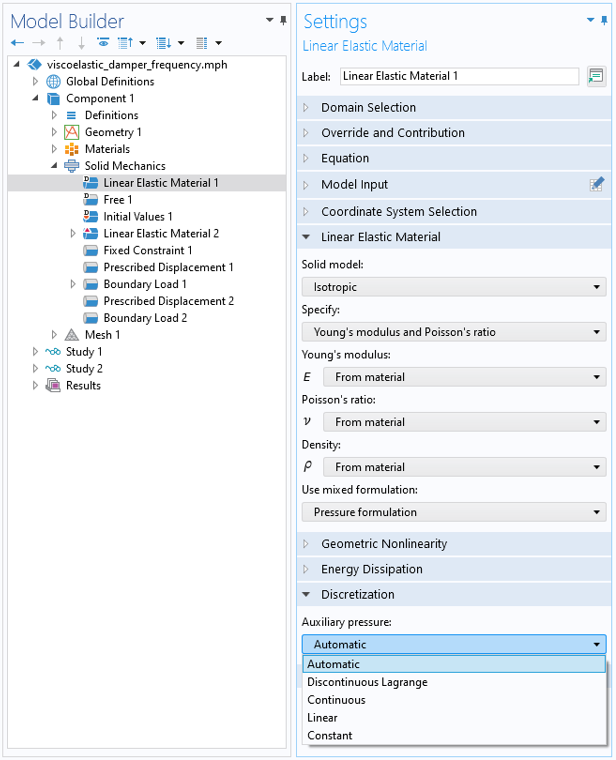
混合公式改进
在可以选择混合公式的材料模型中,您现在可以修改额外因变量(压力或体积应变)的离散化,这样一来,在低压缩性的材料中更容易避免锁定和不稳定性。
在线弹性材料 设置下选择混合公式后,软件将自动为材料模型生成一个新的离散化 栏。在此栏中,您可以为额外的因变量选择不同类型的形函数。
新的教学案例
COMSOL Multiphysics® 6.0 版本的“多体动力学模块”引入了多个新的教学案例。
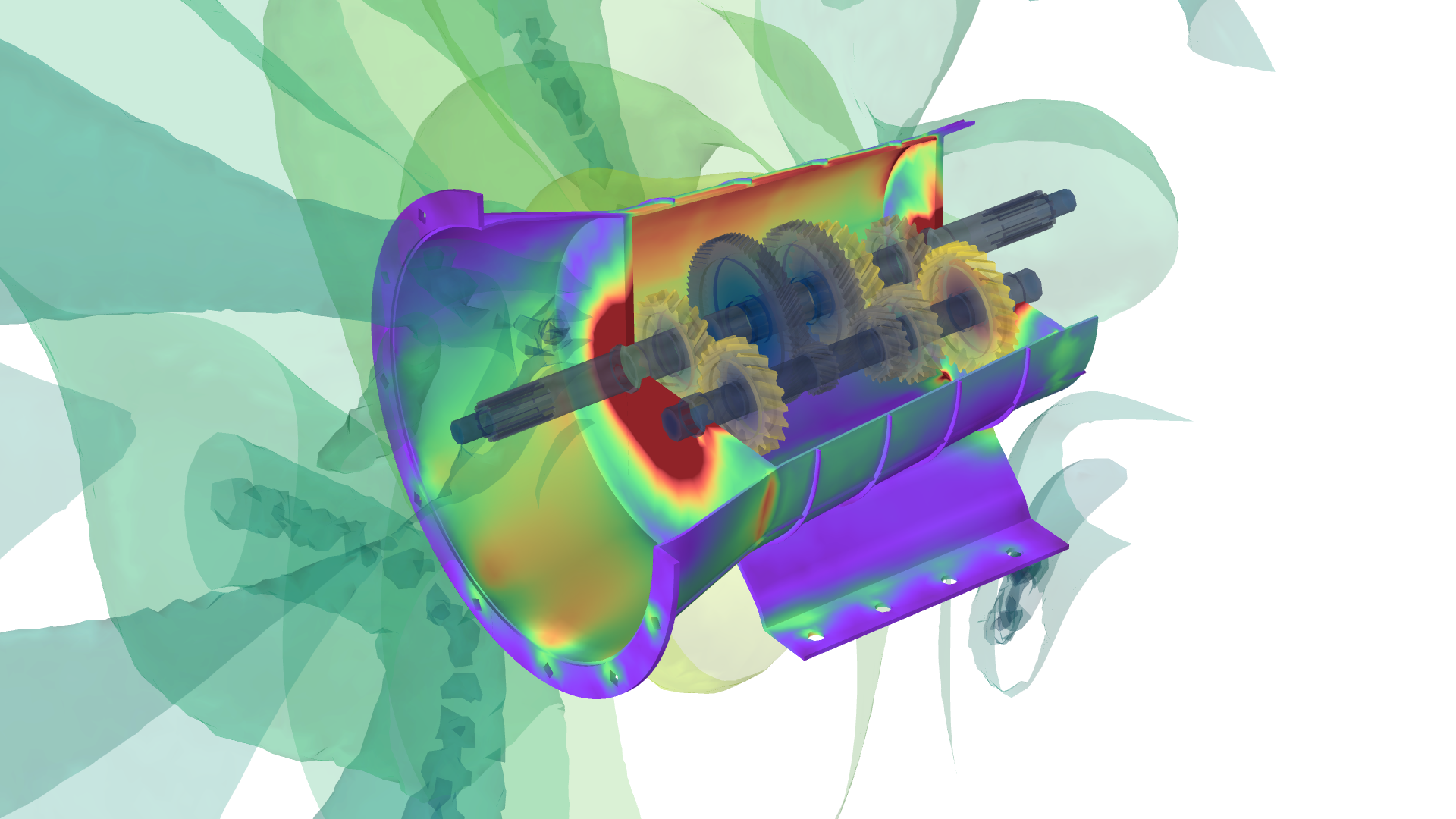
辊子输送机动力学
“案例库”标题:
roller_conveyor_dynamics
从“案例下载”页面下载
变速箱的振动和噪声建模:CMS 版本
“案例库”标题:
gearbox_vibration_noise_cms
从“案例下载”页面下载

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}